Определение полярности аккумуляторных батарей — АрхШина
У автомобильных аккумуляторов бывает полярность двух видов: прямая и обратная. Иногда продавцы аккумуляторов говорят «аккумулятор с правым плюсом» или «аккумулятор с левым плюсом». Во всех этих случаях речь идет о расположении положительной и отрицательной клемм аккумулятора (полюсных выводов). Для правильно определения полярности аккумулятора в легковом автомобиле, его необходимо развернуть к себе, как на рисунке 1.
Непосредственно на выводах, либо рядом с ними обязательно должны быть значки «+» и «-», которые обозначают полюса.
1. Если плюс справа (кстати, он должен быть несколько толще минуса), то это аккумулятор обратной полярности. Ее могут называть также «евро полярность» или обозначать «0».
2. Если плюс слева, то это прямая полярность.
Как правило, на отечественных легковых автомобилях установлены аккумуляторы, имеющие прямую полярность. На иномарках же в ходу обратная полярность.
Совсем иначе обстоит дело с полярностью у аккумуляторов для грузовиков, автобусов, строительной и специальной техники. Это относится к аккумуляторным батареям емкостью более 110 Ач. Определение полярности аккумуляторов, используемых в грузовых автомобилях показано на рис. 3
«3» — «+» слева (евро, обратная). Для европейских грузовиков.
«4» — «+» справа (стандартная, прямая). Для российских грузовиков.
Еще одна особенность АКБ — исполнение корпуса. Различают два основных:
— для азиатских автомобилей (китайских, корейских, японских, некоторых американских). У них клеммы выступают над крышкой корпуса. Они выше, чем европейские АКБ.
Они выше, чем европейские АКБ.
— для европейских авто. Клеммы утоплены в крышку аккумулятора. Они ниже азиатских АКБ.
Несколько слов об уходе за клеммами АКБ.
Уход за полюсными выводами аккумуляторной батареи сводится к выявлению и уничтожению следов коррозии. Следы коррозии выглядят как порошкообразные отложения белого или желтоватого цвета.
Для обработки клемм нужно:
1. Снять аккумулятор с автомобиля.
2. Обработать выводы батареи раствором воды с содой.
3. Начнется реакция с образованием пузырьков. Выводы станут коричневого цвета.
4. При необходимости зачистить выводы металлической щеткой.
5. После завершения реакции вытереть полюсные выводы и саму батарею смоченной в холодной воде тряпкой и просушить аккумулятор.
6. Поставить АКБ в гнездо на автомобиль.
7. Нанести тонкий слой вазелина на клеммы и выводы. Это предотвратит дальнейшее образование коррозии.
8. При выключенном зажигании подсоединить провода к полюсным выводам аккумулятора.
| ENERGIZER EP91J | Искать фото | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | ||
| ENERGIZER EP95J | Искать фото | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | ||
| SAFA S95-J | Искать фото | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | ||
| BERGA 5954040837902 | Искать фото | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | ||
| EXIDE EA954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| EXIDE EB954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| EXIDE _EA954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| EXIDE _EB954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| VARTA 5954040833132 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| MAGNETI MARELLI 065095070019 | Искать фото | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | ||
| MAGNETI MARELLI 065100072019 | Искать фото | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | ||
| BERGA 5914000747902 | Искать фото | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | ||
| TUDOR TA954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| TUDOR TB954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| TUDOR _TA954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| TUDOR _TB954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| FULMEN FA954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| FULMEN FB954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| AFA 5914000746062 | Искать фото | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | ||
| SONNAK SA954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| SONNAK SB954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| CENTRA CA954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| CENTRA CB954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| DETA DA954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| DETA DB954 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Напряжение [В]: 12 | |||
| YUASA 335 | Искать фото | Стартерная аккумуляторная батарея Исполнение днищевой планки: B1 | ||
| YUASA YBX3335 | Стартерная аккумуляторная батарея Исполнение днищевой планки: B1 | |||
| YUASA YBX5335 | Стартерная аккумуляторная батарея Исполнение днищевой планки: B1 | |||
| GS 335 | Искать фото | Стартерная аккумуляторная батарея Исполнение днищевой планки: B1 | ||
| GS GLD335 | Стартерная аккумуляторная батарея Исполнение днищевой планки: B1 | |||
| GS SLV335 | Стартерная аккумуляторная батарея Исполнение днищевой планки: B1 |
 5
5 9
9 9
9| ENERGIZER | EA70L3 | Стартерная аккумуляторная батарея |
| Купить | |
| ENERGIZER | EP74L3 | Стартерная аккумуляторная батарея |
| Купить | |
| ENERGIZER | EM77L3 | Стартерная аккумуляторная батарея |
| Купить | |
| EXIDE | EA770 | Стартерная аккумуляторная батарея |
| Купить | |
| EXIDE | EB740 | Стартерная аккумуляторная батарея |
| Купить | |
| EXIDE | EA770 | Стартерная аккумуляторная батарея |
| Купить | |
| EXIDE | EB740 | Стартерная аккумуляторная батарея |
| Купить | |
| VARTA | 570901076D852 | Стартерная аккумуляторная батарея |
| Купить | |
| VARTA | 570901076E962 | Стартерная аккумуляторная батарея |
| ||
| VARTA | 5740120683132 | Стартерная аккумуляторная батарея |
| Купить | |
| VARTA | 5774000783162 | Стартерная аккумуляторная батарея |
| Купить | |
| MAGNETI MARELLI | 068074068010 | Стартерная аккумуляторная батарея |
| Купить | |
| BERGA | 5741040687902 | Стартерная аккумуляторная батарея |
| Купить | |
| BERGA | 5774000787502 | Стартерная аккумуляторная батарея |
| Купить | |
| VEMO | V99170015 | Стартерная аккумуляторная батарея |
| Купить | |
| VEMO | V99170022 | Стартерная аккумуляторная батарея |
| Купить | |
| VEMO | V99170022 | Стартерная аккумуляторная батарея |
| Купить | |
| TUDOR | TA770 | Стартерная аккумуляторная батарея |
| Купить | |
| TUDOR | TB740 | Стартерная аккумуляторная батарея |
| Купить | |
| TUDOR | TA770 | Стартерная аккумуляторная батарея |
| Купить | |
| TUDOR | TB740 | Стартерная аккумуляторная батарея |
| Купить | |
| AFA | 5724090686092 | Стартерная аккумуляторная батарея |
| Купить | |
| AFA | 5724090686092 | Стартерная аккумуляторная батарея |
| Купить | |
| AFA | 5741040686062 | Стартерная аккумуляторная батарея |
| Купить | |
| AFA | 5741040686062 | Стартерная аккумуляторная батарея |
| Купить | |
| YUASA | 096AGM | Стартерная аккумуляторная батарея |
| Купить | |
| YUASA | 096T | Стартерная аккумуляторная батарея |
| Купить | |
| YUASA | YBX3096 | Стартерная аккумуляторная батарея |
| Купить | |
| YUASA | YBX5096 | Стартерная аккумуляторная батарея |
| Купить |
Аккумуляторы Hawker PowerSafe V с фронтальным расположение полюсных выводов
Описание товара «Аккумуляторы Hawker PowerSafe V с фронтальным расположение полюсных выводов»:
Стационарные свинцово-кислотные аккумуляторы герметизированного серии PowerSafe V c фронтальным расположением полюсных выводов соответствуют самым высоким требованиям по безопасности, электробезопасности, взрыво- и пожаробезопасности.
В процессе эксплуатации не требуют обслуживания.
Сепаратор
Выполненный в форме конверта микропористый сепаратор из стекловолокна с высоким коэффициентом абсорбции электролита
Корпус и крышка аккумулятора
Для изготовления деталей корпуса и крышки аккумулятора применяется ударопрочный и устойчивый к вибрациям пластик ABS (акрил-бутадиен-стирол). По классу огнестойкости пластик соответствует категории V-0 по UL-94.
Технологически обеспечена высокая герметичность.
Электролит
Раствор серной кислоты, абсорбированный в сепараторе
Исполнение полюсных выводов
Аккумуляторы c фронтальным расположением полюсных выводов.
Конструкция полюсных выводов обеспечивает высокую надежность электрического соединения.
Для обеспечения максимальной электропроводимости и механической прочности применяется латунный вкладыш (втулка) с резьбой M6.
Перемычки
Для соединения аккумуляторов применяются медные изолированные перемычки с изолирующими полюсные выводы крышками (колпачками), полюсный болт для подключения перемычек из высококачественной коррозионностойкой стали
Аккумуляторы с внутренней рекомбинацией газов. Рекомбинация газов не менее 95%. Опционально: возможно обеспечение системы централизованного отвода газов.
Рекомбинация газов не менее 95%. Опционально: возможно обеспечение системы централизованного отвода газов.
Особенности
- Высокая плотность энергии
- 12В блоки емкостью от 31 до 170 Ач
- Необслуживаемые: не требуется долива дистиллированной воды в электролит
- Незначительное газовыделение позволяет устанавливать батареи в помещениях с технологическим оборудованием и персоналом, а также в офисах.
Что обеспечивает возможность снижения расходов на эксплуатацию и обслуживание аккумуляторов
- на моноблоках весом свыше 25 кг предусмотрены специальные ручки для переноса
- хранение в течение 6 месяцев без подзаряда при температуре 20°С
- напряжение постоянного подзаряда 2,28 В/эл. при 20°C
- напряжение ускоренного заряда 2,4 В/Эл при 20°С
- диапазон рабочих температур -10°C…+45°C
- срок службы не менее 15 лет
- происхождение — Франция, Англия
| Бренд | Название | Наличие | Срок поставки | Цена | Заказ | |||
|---|---|---|---|---|---|---|---|---|
| KAGER700117 | KAGER 700117 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
Аналоги для kager 700117 | ||||||||
| KAGER70-0117 | KAGER 70-0117 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ000 982 38 08 | MERCEDES-BENZ 000 982 38 08 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ001 541 02 01 | MERCEDES-BENZ 001 541 02 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ001 541 37 01 | MERCEDES-BENZ 001 541 37 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ001 541 40 01 | MERCEDES-BENZ 001 541 40 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ001 541 45 01 | MERCEDES-BENZ 001 541 45 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ001 541 72 01 | MERCEDES-BENZ 001 541 72 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ001 541 76 01 | MERCEDES-BENZ 001 541 76 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ001 541 80 01 | MERCEDES-BENZ 001 541 80 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ002 541 41 01 | MERCEDES-BENZ 002 541 41 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| MERCEDES-BENZ004 541 13 01 | MERCEDES-BENZ 004 541 13 01 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| OPEL1201308 | OPEL 1201308 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| VW1J0 915 105 AH | VW 1J0 915 105 AH | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| VW2D0 915 105 C | VW 2D0 915 105 C | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| VOLVO30745777 | VOLVO 30745777 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| FIAT46211823 | FIAT 46211823 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| JAGUAR4R83 10655 BA | JAGUAR 4R83 10655 BA | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| JAGUAR4R83 10655 CA | JAGUAR 4R83 10655 CA | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| CITROEN5600 RY | CITROEN 5600 RY | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| RENAULT77 01 376 967 | RENAULT 77 01 376 967 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| RENAULT77 01 381 088 | RENAULT 77 01 381 088 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| RENAULT77 11 222 783 | RENAULT 77 11 222 783 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| RENAULT82 00 687 749 | RENAULT 82 00 687 749 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| AUDI8K0 915 105 E | AUDI 8K0 915 105 E | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| OPEL93182214 | OPEL 93182214 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| PORSCHE999 611 088 20 | PORSCHE 999 611 088 20 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| ROVERYGD 5001 30 | ROVER YGD 5001 30 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| ROVERYGD 5001 60 | ROVER YGD 5001 60 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| LAND ROVERYGD500160 | LAND ROVER YGD500160 | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| PEUGEOTZC 98 652 82 U | PEUGEOT ZC 98 652 82 U | Стартерная аккумуляторная батарея Вид зажима цепи: 1 | Уточнить наличие | |||||
| Бренд | Название | Наличие | Срок поставки | Цена | Заказ | |||
|---|---|---|---|---|---|---|---|---|
| JCB70800300 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | ||||||
Аналоги для jcb 70800300 | ||||||||
| EXIDEEG1100 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | ||||||
| MAGNETI MARELLI065110076019 | MAGNETI MARELLI 065110076019 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Аккумуляторная батарея: HEAVY DUTY (увел. | Уточнить наличие | |||||
| TUDORTG1100 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | ||||||
| FULMENFG1100 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | ||||||
| CENTRACG1100 | CENTRA CG1100 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| DETADG1100 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | ||||||
| EXIDE596015060 | EXIDE 596015060 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| EXIDE605 27 | EXIDE 605 27 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| EXIDE610047068 | EXIDE 610047068 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| EXIDE610 47 | EXIDE 610 47 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| EXIDE663SE | EXIDE 663SE | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| MAGNETI MARELLI500038004 | MAGNETI MARELLI 500038004 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Аккумуляторная батарея: HEAVY DUTY (увел. | Уточнить наличие | |||||
| TUDOR596015060 | TUDOR 596015060 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| TUDOR605 27 | TUDOR 605 27 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| TUDOR610047068 | TUDOR 610047068 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| TUDOR610 47 | TUDOR 610 47 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| FULMEN596015060 | FULMEN 596015060 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| FULMEN610047068 | FULMEN 610047068 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| CENTRA596015060 | CENTRA 596015060 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| CENTRA610047068 | CENTRA 610047068 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| DETA596015060 | DETA 596015060 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| DETA605 27 | DETA 605 27 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| DETA610047068 | DETA 610047068 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| DETA610 47 | DETA 610 47 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| IVECO2994699 | IVECO 2994699 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| IVECO59615 | IVECO 59615 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| JCB70800300 | JCB 70800300 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
| JCB729/10643 | JCB 729/10643 | Стартерная аккумуляторная батарея; Стартерная аккумуляторная батарея Высота [мм]: 235 | Уточнить наличие | |||||
 устойчив. к цикл. и вибр. нагрузкам)
устойчив. к цикл. и вибр. нагрузкам) устойчив. к цикл. и вибр. нагрузкам)
устойчив. к цикл. и вибр. нагрузкам)Последовательность — вывод — Большая Энциклопедия Нефти и Газа, статья, страница 3
Последовательность — вывод
Cтраница 3
Ранее было показано, что некоторые подмножества системы аксиом Fl — F6 также являются полными. Их полнота означает, что если существует последовательность вывода Р для X — Y, использующая все аксиомы Fl — F6, то существует последовательность вывода Р для X — v Y, использующая только аксиомы, входящие в полное множество ( см. упр.
[31]
Их полнота означает, что если существует последовательность вывода Р для X — Y, использующая все аксиомы Fl — F6, то существует последовательность вывода Р для X — v Y, использующая только аксиомы, входящие в полное множество ( см. упр.
[31]
В следующем разделе будет введен геометрический способ описания RAP-последовательности вывода — помеченный направленный ациклический граф. Будет также показано, что каждый такой граф моделирует последовательность вывода. [32]
Маркс очень скоро стал одним из духовных руководителей Докторского клуба. Его огромные знания, сила логики, глубина и последовательность выводов вызывали восхищение даже у людей, старших по возрасту и добившихся определенного общественного признания. С Марксом не только обращались как с равным, но многие открыто признавали его превосходство. Большое влияние оказал он на Кеппена, посвятившего ему свою выпущенную в 1840 г. книгу Фридрих Великий и его противники.
[33]
книгу Фридрих Великий и его противники.
[33]
В уравнения динамики химико-технологических объектов обычно входят в явной или неявной форме статические характеристики. Поэтому методика аналитического составления уравнений динамики в основном аналогична последовательности вывода статических зависимостей. [34]
После анализа схемы и макетирования разрабатывается топологическая карта. Вначале все компоненты располагают, исходя из общих требований к топологии, желаемой последовательности выводов и минимального числа пересечений проводников. Если вид соединений получается сложным, первоначальное расположение компонентов изменяется. После получения приемлемого эскиза топологическая карта вычерчивается в масштабе. В конечном итоге составление топологической карты преследует цель минимизировать площадь интегральной схемы с учетом всех схемотехнических и технологических требований. [35]
[35]
Ранее было показано, что некоторые подмножества системы аксиом Fl — F6 также являются полными. Их полнота означает, что если существует последовательность вывода Р для X — Y, использующая все аксиомы Fl — F6, то существует последовательность вывода Р для X — Y, использующая только аксиомы, входящие в полное множество ( см. упр. [36]
Ранее было показано, что некоторые подмножества системы аксиом Fl — F6 также являются полными. Их полнота означает, что если существует последовательность вывода Р для X — Y, использующая все аксиомы Fl — F6, то существует последовательность вывода Р для X — v Y, использующая только аксиомы, входящие в полное множество ( см. упр. [37]
Для прогноза ожидаемой добычи нефти по характеристикам вытеснения предварительно необходимо знать прогноз в изменении добычи жидкости и число добывающих скважин. Так как эти вопросы решаются на поздней стадии разработки, когда обводненность продукции составляет 50 % и более, что для этого периода добывные возможности скважин по жидкости, как правило, хорошо изучены, несложно решаются вопросы сохранения или последовательности вывода скважин из эксплуатации, а поэтому прогноз по отбираемой жидкости и числу добывающих скважин должен задаваться.
[38]
Так как эти вопросы решаются на поздней стадии разработки, когда обводненность продукции составляет 50 % и более, что для этого периода добывные возможности скважин по жидкости, как правило, хорошо изучены, несложно решаются вопросы сохранения или последовательности вывода скважин из эксплуатации, а поэтому прогноз по отбираемой жидкости и числу добывающих скважин должен задаваться.
[38]
Для прогноза ожидаемой добычи нефти по характеристикам вытес — 1ения предварительно необходимо знать прогноз в изменении добычи кидкости и число добывающих скважин. Так как эти вопросы решаются ia поздней стадии разработки, когда обводненность продукции состав — 1яет 50 % и более, что для этого периода добывные возможности сква-кин по жидкости, как правило, хорошо изучены, несложно решаются зопросы сохранения или последовательности вывода скважин из эксплуатации, а поэтому прогноз по отбираемой жидкости и числу добывающих жважин должен задаваться.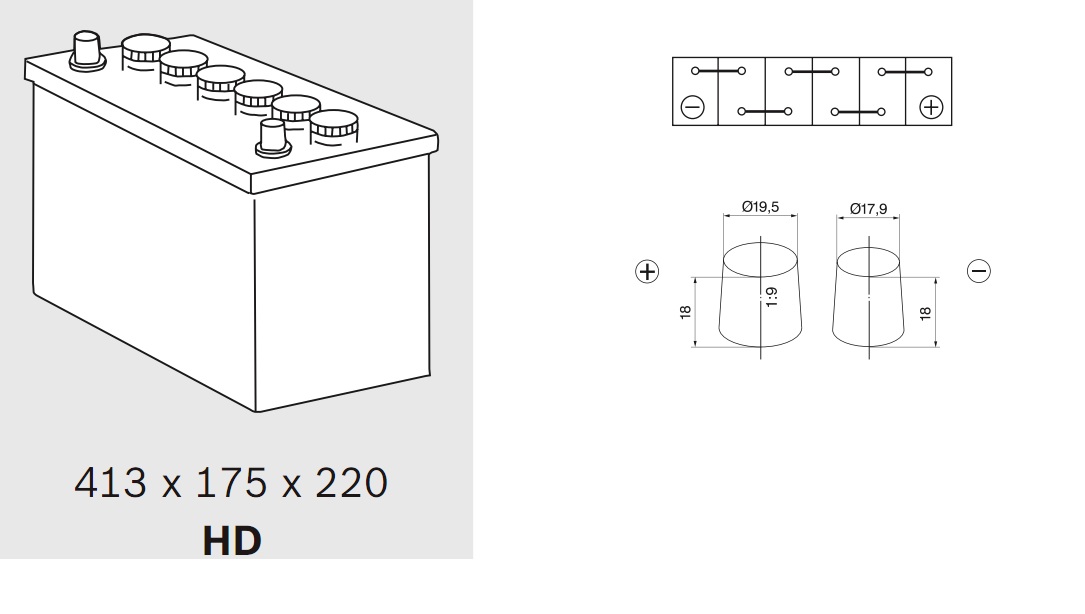 [39]
[39]
Уже показано, что можно подставить F-зависимость с большей правой частью в вывод, использующий В-аксиомы. Единственным результатом этой подстановки является возможность получить F-зависимость о большей правой частью, чем в первоначально полученной F-зависимости, как, например, в случае 1, представленном выше, где Z — CVW заменила Z — CW. Эта замена является как раз другой подстановкой F-зависимости с большей правой частью. Таким образом, подстановка F-зависи-мостей с большими правыми частями может осуществляться по всей последовательности вывода. [40]
Уже показано, что можно подставить F-зависимость с большей правой частью в вывод, использующий В-аксиомы. Единственным результатом этой подстановки является возможность получить F-зависимость о большей правой частью, чем в первоначально полученной F-зависимости, как, например, в случае 1, представленном выше, где Z — CVW заменила Z — CW. Эта замена является как раз другой подстановкой F-зависимости с большей правой частью. Таким образом, подстановка F-зависи-мостей с большими правыми частями может осуществляться по всей последовательности вывода.
[41]
Эта замена является как раз другой подстановкой F-зависимости с большей правой частью. Таким образом, подстановка F-зависи-мостей с большими правыми частями может осуществляться по всей последовательности вывода.
[41]
В простейшем виде перелистыватель при каждом нажатии на клавишу выдает на дисплей новую страницу информации. В данную категорию программного обеспечения включены также программы, в которых пользователь может контролировать порядок выдачи страниц на дисплей. Могут быть использованы возможности микрокомпьютера по размещению текста в различных местах экрана и выводу графиков, но при каждом применении такой программы выдается один и тот же материал. Подобное представление лишь незначительно отличается от использования киноаппаратуры. Эти отличия состоят в том, что нельзя достичь столь же хорошего качества графических изображений, но зато студент может контролировать скорость появления материала. Некоторым усовершенствованием является программа, позволяющая контролировать последовательность вывода страниц, но и она имеет мало преимуществ перед книгой, содержащей аналогичный материал. Весьма серьезным преимуществом компьютерных дисплеев по сравнению с киноаппаратурой или книгами является возможность введения поправок. Если программа не защищена и оператор имеет соответствующие технические навыки, то можно изменить определенную часть материала, не воздействуя на остальную часть программы. Фактически в самой программе могут содержаться средства для ее изменения. Таким образом химический справочник можно поддерживать на современном уровне без его перепечатывания, если он составлен в виде программы, а не печатного тома.
[42]
Весьма серьезным преимуществом компьютерных дисплеев по сравнению с киноаппаратурой или книгами является возможность введения поправок. Если программа не защищена и оператор имеет соответствующие технические навыки, то можно изменить определенную часть материала, не воздействуя на остальную часть программы. Фактически в самой программе могут содержаться средства для ее изменения. Таким образом химический справочник можно поддерживать на современном уровне без его перепечатывания, если он составлен в виде программы, а не печатного тома.
[42]
Страницы: 1 2 3
2 + \ … \ nonumber \], где \ (a_0 = g (i) \ ne 0 \). Следовательно,
\ [f (z) = \ dfrac {a_0} {z — i} + a_1 + a_2 (z — i) + \ … \ nonumber \]
Это показывает, что \ (z = i \) является полюсом порядка 1.
Аргументы для \ (z = -i \) и \ (z = -1 \) аналогичны.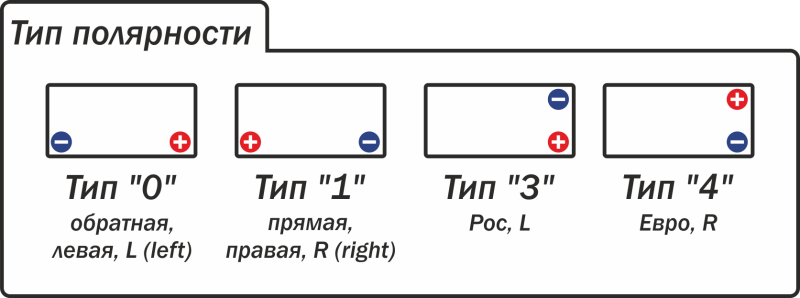
20.1 Магнитные поля, силовые линии и сила
Магниты и намагниченность
Люди знали о магнитах и магнетизме тысячи лет. Самые ранние записи относятся к древним временам, особенно в области Малой Азии под названием Магнезия — название этого региона является источником таких слов, как магнит .Магнитные породы, найденные в Магнезии, которая сейчас является частью западной Турции, вызвали интерес в древние времена. Когда люди впервые обнаружили магнитные породы, они, вероятно, обнаружили, что некоторые части этих пород притягивают куски железа или других магнитных пород сильнее, чем другие части. Эти области называются полюсами магнита. Магнитный полюс — это часть магнита, которая оказывает самую сильную силу на другие магниты или магнитный материал, например, железо. Например, полюса стержневого магнита показаны на рисунке 20.2 — это место, где сосредоточены скрепки.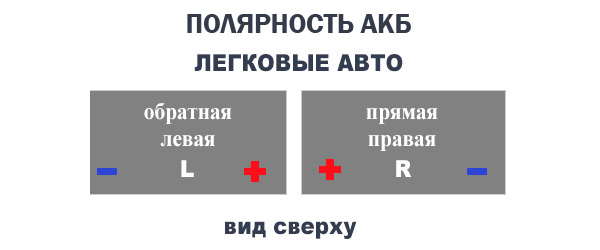
Рис. 20.2 Стержневой магнит со скрепками, притянутыми к двум полюсам.
Если стержневой магнит подвешен так, что он свободно вращается, один полюс магнита всегда будет поворачиваться на север, а противоположный полюс — на юг. Это открытие привело к созданию компаса, который представляет собой просто небольшой удлиненный магнит, установленный так, чтобы он мог свободно вращаться. Пример компаса показан на рисунке 20.3. Полюс магнита, направленный на север, называется северным полюсом, а противоположный полюс магнита — южным.
Рис. 20.3 Компас — это удлиненный магнит, установленный в устройстве, которое позволяет магниту свободно вращаться.
Открытие того, что один полюс магнита ориентирован на север, а другой — на юг, позволило людям идентифицировать северный и южный полюса любого магнита. Затем было замечено, что северные полюса двух разных магнитов отталкиваются друг от друга, как и южные полюса. И наоборот, северный полюс одного магнита притягивает южный полюс других магнитов. Эта ситуация аналогична ситуации с электрическим зарядом, когда одинаковые заряды отталкиваются, а разные — притягиваются. В магнитах мы просто заменяем заряд на полюс : полюса отталкиваются, а полюса — притягиваются. Это показано на рисунке 20.4, на котором показано, как сила между магнитами зависит от их взаимной ориентации.
Эта ситуация аналогична ситуации с электрическим зарядом, когда одинаковые заряды отталкиваются, а разные — притягиваются. В магнитах мы просто заменяем заряд на полюс : полюса отталкиваются, а полюса — притягиваются. Это показано на рисунке 20.4, на котором показано, как сила между магнитами зависит от их взаимной ориентации.
Рис. 20.4. В зависимости от их взаимной ориентации полюса магнита будут притягиваться друг к другу или отталкиваться.
Еще раз рассмотрим тот факт, что полюс магнита, направленный на север, называется северным полюсом магнита.Если противоположные полюса притягиваются, то магнитный полюс Земли, который находится близко к географическому Северному полюсу, должен быть магнитным южным полюсом! Точно так же магнитный полюс Земли, который находится близко к географическому Южному полюсу, должен быть магнитным северным полюсом. Эта ситуация изображена на рис. 20.5, на котором Земля представлена как содержащая гигантский внутренний стержневой магнит с южным магнитным полюсом на географическом Северном полюсе и наоборот. Если бы мы каким-то образом подвесили гигантский стержневой магнит в космосе рядом с Землей, то северный полюс космического магнита был бы притянут к южному полюсу внутреннего магнита Земли.По сути, именно это происходит со стрелкой компаса: ее северный магнитный полюс притягивается к южному полюсу внутреннего магнита Земли.
Если бы мы каким-то образом подвесили гигантский стержневой магнит в космосе рядом с Землей, то северный полюс космического магнита был бы притянут к южному полюсу внутреннего магнита Земли.По сути, именно это происходит со стрелкой компаса: ее северный магнитный полюс притягивается к южному полюсу внутреннего магнита Земли.
Рис. 20.5. Землю можно представить как содержащую гигантский магнит, проходящий через ее ядро. Южный магнитный полюс магнита Земли находится на географическом Северном полюсе, поэтому северный полюс магнитов притягивается к Северному полюсу, так северный полюс магнитов получил свое название. Точно так же южный полюс магнитов притягивается к географическому Южному полюсу Земли.
Что произойдет, если разрезать стержневой магнит пополам? Вы получаете один магнит с двумя южными полюсами и один магнит с двумя северными полюсами? Ответ отрицательный: каждая половина стержневого магнита имеет северный и южный полюсы. Вы даже можете продолжить разрезать каждую часть стержневого магнита пополам, и вы всегда получите новый, меньший магнит с двумя противоположными полюсами. Как показано на рисунке 20.6, вы можете продолжить этот процесс вплоть до атомного масштаба, и вы обнаружите, что даже самые маленькие частицы, которые ведут себя как магниты, имеют два противоположных полюса.Фактически, ни в одном эксперименте не было обнаружено никаких объектов с одним магнитным полюсом, от мельчайших субатомных частиц, таких как электроны, до самых больших объектов во Вселенной, таких как звезды. Поскольку магниты всегда имеют два полюса, их называют магнитными диполями: di означает два . Ниже мы увидим, что магнитные диполи обладают свойствами, аналогичными электрическим диполям.
Как показано на рисунке 20.6, вы можете продолжить этот процесс вплоть до атомного масштаба, и вы обнаружите, что даже самые маленькие частицы, которые ведут себя как магниты, имеют два противоположных полюса.Фактически, ни в одном эксперименте не было обнаружено никаких объектов с одним магнитным полюсом, от мельчайших субатомных частиц, таких как электроны, до самых больших объектов во Вселенной, таких как звезды. Поскольку магниты всегда имеют два полюса, их называют магнитными диполями: di означает два . Ниже мы увидим, что магнитные диполи обладают свойствами, аналогичными электрическим диполям.
Рис. 20.6. Все магниты имеют два противоположных полюса, от самых маленьких, таких как субатомные частицы, до самых больших, таких как звезды.
Часы с физикой
Введение в магнетизм
Это видео представляет собой интересное введение в магнетизм и обсуждает, в частности, как электроны вокруг своих атомов вносят вклад в наблюдаемые нами магнитные эффекты.
Проверка захвата
К какому магнитному полюсу Земли притягивается северный полюс стрелки компаса?
- Северный полюс стрелки компаса притягивается к северному магнитному полюсу Земли, который расположен недалеко от географического Северного полюса Земли.
- Северный полюс стрелки компаса притягивается к южному магнитному полюсу Земли, который расположен недалеко от географического Северного полюса Земли.
- Северный полюс стрелки компаса притягивается к северному магнитному полюсу Земли, который расположен недалеко от географического Южного полюса Земли.
- Северный полюс стрелки компаса притягивается к южному магнитному полюсу Земли, который расположен недалеко от географического Южного полюса Земли.
Только некоторые материалы, такие как железо, кобальт, никель и гадолиний, обладают сильными магнитными эффектами.Такие материалы называются ферромагнетиками, по латинскому слову ferrum , обозначающему железо. Другие материалы обладают слабыми магнитными эффектами, которые можно обнаружить только с помощью чувствительных инструментов. Ферромагнитные материалы не только сильно реагируют на магниты — так, как железо притягивается к магнитам, — но они также могут намагничиваться сами, то есть их можно вызвать намагничиванием или превратить в постоянные магниты (рис. 20.7). Постоянный магнит — это просто материал, который сохраняет свои магнитные свойства в течение длительного времени даже при воздействии размагничивающих воздействий.
Другие материалы обладают слабыми магнитными эффектами, которые можно обнаружить только с помощью чувствительных инструментов. Ферромагнитные материалы не только сильно реагируют на магниты — так, как железо притягивается к магнитам, — но они также могут намагничиваться сами, то есть их можно вызвать намагничиванием или превратить в постоянные магниты (рис. 20.7). Постоянный магнит — это просто материал, который сохраняет свои магнитные свойства в течение длительного времени даже при воздействии размагничивающих воздействий.
Рис. 20.7 Немагниченный кусок железа помещается между двумя магнитами, нагревается, а затем охлаждается или просто постукивается в холодном состоянии. Утюг становится постоянным магнитом с выровненными полюсами, как показано: его южный полюс примыкает к северному полюсу исходного магнита, а его северный полюс примыкает к южному полюсу исходного магнита. Обратите внимание, что силы притяжения создаются между центральным магнитом и внешними магнитами.
Когда магнит приближается к ранее немагниченному ферромагнитному материалу, он вызывает локальное намагничивание материала с противоположными полюсами, расположенными ближе всего, как на правой стороне рисунка 20. 7. Это вызывает силу притяжения, поэтому немагнитное железо притягивается к магниту.
7. Это вызывает силу притяжения, поэтому немагнитное железо притягивается к магниту.
То, что происходит в микроскопическом масштабе, показано на Рисунке 7 (а). Области внутри материала, называемые доменами, действуют как маленькие стержневые магниты. Внутри доменов выровнены магнитные полюса отдельных атомов. Каждый атом действует как крошечный стержневой магнит. В немагнитном ферромагнитном объекте домены имеют небольшие размеры и ориентированы случайным образом. В ответ на внешнее магнитное поле домены могут вырасти до миллиметра, выравниваясь, как показано на рисунке 7 (b).Это индуцированное намагничивание можно сделать постоянным, если материал нагреть, а затем охладить, или просто постучать в присутствии других магнитов.
Рис. 20.8 (a) Немагниченный кусок железа или другой ферромагнитный материал имеет произвольно ориентированные домены. (б) При намагничивании внешним магнитом домены демонстрируют большее выравнивание, и некоторые из них растут за счет других.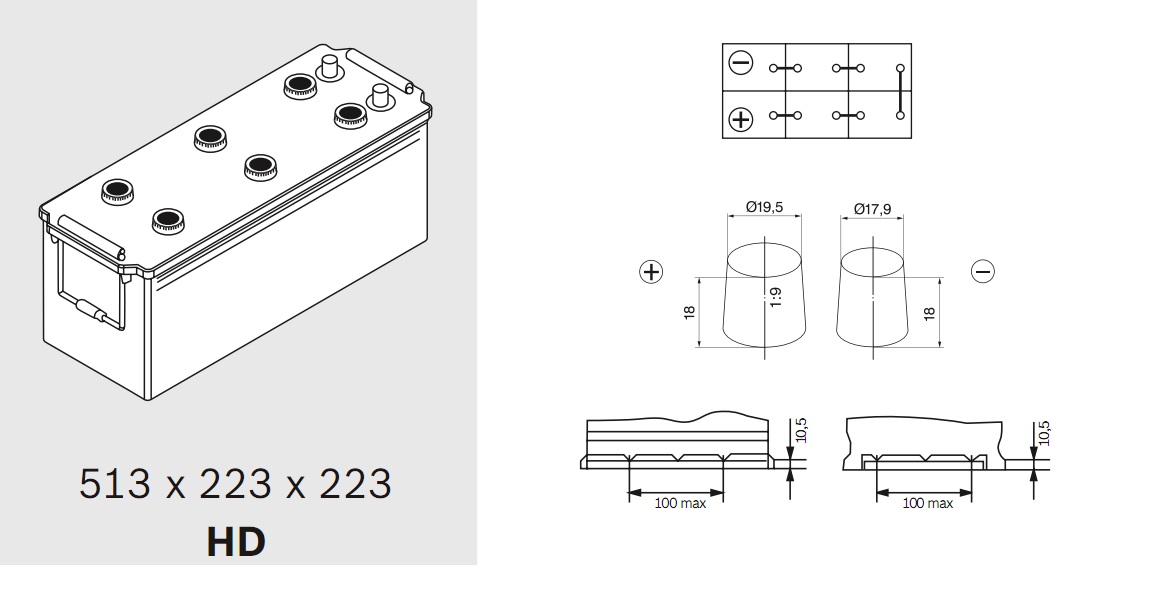 Отдельные атомы выровнены внутри доменов; каждый атом действует как крошечный стержневой магнит.
Отдельные атомы выровнены внутри доменов; каждый атом действует как крошечный стержневой магнит.
И наоборот, постоянный магнит можно размагнитить сильными ударами или нагреванием в отсутствие другого магнита.Повышенное тепловое движение при более высокой температуре может нарушить и изменить ориентацию и размер доменов. Для ферромагнитных материалов существует четко определенная температура, называемая температурой Кюри, выше которой они не могут намагничиваться. Температура Кюри для железа составляет 1043 К (770 ° C ° C), что намного выше комнатной температуры. Есть несколько элементов и сплавов, которые имеют температуру Кюри намного ниже комнатной температуры и являются ферромагнитными только ниже этих температур.
Snap Lab
Магниты на холодильник
Мы знаем, что подобные магнитные полюса отталкиваются, а разные полюса притягиваются. Посмотрим, сможете ли вы показать это на примере двух магнитов на холодильник. Прилипнут ли магниты, если их перевернуть? Почему они вообще прилепляются к дверце холодильника? Что вы можете сказать о магнитных свойствах дверцы холодильника возле магнита? Магниты на холодильник прилипают к металлическим или пластиковым ложкам? Прилипают ли они ко всем типам металла?
Прилипнут ли магниты, если их перевернуть? Почему они вообще прилепляются к дверце холодильника? Что вы можете сказать о магнитных свойствах дверцы холодильника возле магнита? Магниты на холодильник прилипают к металлическим или пластиковым ложкам? Прилипают ли они ко всем типам металла?
Проверка захвата
У вас есть один магнит с обозначенными северным и южным полюсами.Как вы можете использовать этот магнит для определения северного и южного полюсов других магнитов?
- Если северный полюс известного магнита отталкивается полюсом неизвестного магнита при приближении их, этот полюс неизвестного магнита является его северным полюсом; в противном случае это его южный полюс.
- Если северный полюс известного магнита притягивается к полюсу неизвестного магнита при приближении их, этот полюс неизвестного магнита является его северным полюсом; в противном случае это его южный полюс.
Pole Motor — обзор
9.4.
 4 Двигатель с явнополюсным двигателем
4 Двигатель с явнополюсным двигателемМоделирование двигателя с явным полюсом основано на эквивалентной схеме, аналогичной схеме для двигателя с гладким ротором на рис. 9.14, с наведенной э.д.с. E из-за возбуждения ротора. Но из-за значимости и, как следствие, реактивного компонента крутящего момента, одиночное синхронное реактивное сопротивление (X s ) должно быть подразделено на реактивное сопротивление прямой оси (X d ) и реактивное сопротивление квадратурной оси (X q ). ). Эти реактивные сопротивления такие же, как мы обсуждали в предыдущем разделе.
Временная векторная диаграмма представляет собой комбинацию диаграмм, показанных на рис. 9.16 и 9.17, и снова сопротивление игнорировалось. Построение диаграммы включает в себя разделение тока на компоненты прямой и квадратурной оси, прежде чем реактивное напряжение упадет, можно будет идентифицировать I d X d и I q X q . Мы не будем вдаваться в подробности, но типичные векторные диаграммы для условий перегрузки и недовозбуждения показаны на рис. 9.18A и B, соответственно, причем оба эскиза относятся к одной и той же выходной мощности или крутящему моменту.
9.18A и B, соответственно, причем оба эскиза относятся к одной и той же выходной мощности или крутящему моменту.
Рис. 9.18. Временные векторные диаграммы для роторного двигателя с явнополюсным возбуждением.
В случае перезарядки ток является опережающим, т.е. запаздывающие Vars экспортируются, тогда как в случае недовозбуждения необходимы дополнительные запаздывающие Vars, чтобы дополнить возбуждение, обеспечиваемое током ротора.
Мощность и крутящий момент могут быть получены из рис. 9.18 в терминах контролируемых переменных (V, E и крутящий момент нагрузки), но в длительных манипуляциях нет необходимости, и мы просто процитируем хорошо известный результат, что крутящий момент равен задается выражением
T∝EVXdsinδ + V22XdXqXd − Xqsin2δ.
Первый член такой же, как для машины с круглым ротором, которую мы видели ранее, но с X d вместо X, а второй член такой же, как мы нашли для реактивного двигателя. Мы отмечаем, что даже когда возбуждение ротора равно нулю (т. е. E = 0), двигатель с явным полюсом может создавать крутящий момент только за счет действия реактивного сопротивления, но, разумеется, крутящий момент сопротивления зависит от степени выраженности: двигатель с ротором например, на рис. 9.2A, может создавать 5% своего крутящего момента за счет действия сопротивления, тогда как член сопротивления для типа ротора на рис.9.3B легко может внести 30% и более.
е. E = 0), двигатель с явным полюсом может создавать крутящий момент только за счет действия реактивного сопротивления, но, разумеется, крутящий момент сопротивления зависит от степени выраженности: двигатель с ротором например, на рис. 9.2A, может создавать 5% своего крутящего момента за счет действия сопротивления, тогда как член сопротивления для типа ротора на рис.9.3B легко может внести 30% и более.
Полюс статора — обзор
4.6 Методология намотки катушки
На рис. 4.20 показан метод намотки катушки шагового двигателя в геометрической схеме, соответствующей форме статора. На рис. 4.21 показаны обмотки полюсного наконечника статора в физическом контексте. На рисунках можно увидеть пару элементарных катушек, намотанных бифилярно вокруг каждого выступающего полюса статора. Поскольку имеется 8 явных полюсов статора, имеется 16 элементарных катушек.Обратите внимание, что каждая катушка с альтернативным явным полюсом подключена, то есть A1 подключена к A2, подключена к A3, подключена к A4, и аналогично, B1 подключена к B2, подключена к B3, подключена к B4. Другими словами, нет связи между соседними катушками. Система подключения оригинальна и лучше всего показана на принципиальной схеме на рис. 4.22.
Другими словами, нет связи между соседними катушками. Система подключения оригинальна и лучше всего показана на принципиальной схеме на рис. 4.22.
Рис. 4.20. Схема электрических соединений 8 выступающих полюсов статора шагового двигателя. Обратите внимание, что каждый выступающий полюс имеет пару бифилярных обмоток катушек, составляющих в общей сложности 16 элементарных катушек.
Рис. 4.21. Электрическая схема, показанная в физическом контексте, восьми явнополюсных обмоток катушки шагового двигателя. Обратите внимание, что каждый выступающий полюс имеет пару бифилярных обмоток катушек, что в общей сложности составляет 16 катушек. На диаграмме сложно следовать. Нужен острый карандаш, чтобы проследить каждую проволоку от начальной точки до конечной. Будьте осторожны, чтобы различать провода и железный статор.
Рис. 4.22. Схема электрических соединений 16 элементарных катушек обмоток выступающих полюсов статора.Обратите внимание на оригинальное расположение обмоток. Имеется восемь бифилярных катушек. Катушки с бифилярной обмоткой имеют противоположную проводку: «с обратной связью» и «с прямой проводкой». Расположение обмоток означает, что возможна как однополярная, так и биполярная последовательность переключения.
Имеется восемь бифилярных катушек. Катушки с бифилярной обмоткой имеют противоположную проводку: «с обратной связью» и «с прямой проводкой». Расположение обмоток означает, что возможна как однополярная, так и биполярная последовательность переключения.
Система проводки позволяет использовать схему силового привода однополярного привода или схему силового привода биполярного привода. Для униполярной схемы привода необходимо использовать желтый и белый разъемы, как показано на рис. 4.21 и 4.22, но биполярный привод — нет.Оказывается, в настоящее время схема униполярного привода полезна только в качестве академического упражнения. Авторы разработали униполярную схему однажды, чтобы продемонстрировать студентам, и эта схема будет показана позже, но биполярная схема действительно сделала однополярную схему устаревшей. Это связано с улучшением характеристик и снижением стоимости технологии транзисторных интегральных схем, например, драйвера Киза, рис. 4.1. Униполярный метод управления неэффективен, потому что только четверть обмоток используется в любое время для создания крутящего момента. Также требуются резисторы потери мощности, чтобы катушки могли питаться высоким напряжением питания, чтобы обеспечить высокую производительность, и это приводит к потере мощности в силовых резисторах. Таким образом, униполярный метод управления неэффективен ни в электрическом, ни в электромагнитном отношении. Основное преимущество униполярного привода состоит в том, что требуется всего четыре транзистора. Фактически, резисторы потери мощности можно сделать резервными с помощью схемы возбуждения прерывателя. С другой стороны, метод управления с биполярной схемой при использовании схемы прерывания с управлением током является высокоэффективным и имеет высокие характеристики, поскольку отсутствуют резисторы потери мощности, катушки используются на 50%, а механическая выходная мощность увеличивается.
Также требуются резисторы потери мощности, чтобы катушки могли питаться высоким напряжением питания, чтобы обеспечить высокую производительность, и это приводит к потере мощности в силовых резисторах. Таким образом, униполярный метод управления неэффективен ни в электрическом, ни в электромагнитном отношении. Основное преимущество униполярного привода состоит в том, что требуется всего четыре транзистора. Фактически, резисторы потери мощности можно сделать резервными с помощью схемы возбуждения прерывателя. С другой стороны, метод управления с биполярной схемой при использовании схемы прерывания с управлением током является высокоэффективным и имеет высокие характеристики, поскольку отсутствуют резисторы потери мощности, катушки используются на 50%, а механическая выходная мощность увеличивается.
На Рис. 4.22 показана принципиальная схема бифилярных обмоток, намотанных на каждый выступающий полюсный наконечник статора. Здесь можно увидеть, что каждая бифилярная обмотка подключена противоположно, как «вперед», так и «назад». Причина этого показана на рис. 4.23. Рис. 4.23A и B показывают два типа униполярного соединения набора обмоток статора либо набора обмоток, A1, A2, A3, A4, либо набора обмоток, B1, B2, B3, B4. Точно так же на фиг. 4.23A и B показывают два типа биполярного соединения. Эти рисунки показывают, что однополярное соединение использует только половину доступного набора обмоток, тогда как биполярное соединение использует весь набор обмоток.Кроме того, обмотки, независимо от того, соединены ли они как униполярные или биполярные, создают чередующиеся направления магнитодвижущей силы, ммс, которые будут вызывать соответствующее притяжение полюсных наконечников, которые будут показаны ниже.
Причина этого показана на рис. 4.23. Рис. 4.23A и B показывают два типа униполярного соединения набора обмоток статора либо набора обмоток, A1, A2, A3, A4, либо набора обмоток, B1, B2, B3, B4. Точно так же на фиг. 4.23A и B показывают два типа биполярного соединения. Эти рисунки показывают, что однополярное соединение использует только половину доступного набора обмоток, тогда как биполярное соединение использует весь набор обмоток.Кроме того, обмотки, независимо от того, соединены ли они как униполярные или биполярные, создают чередующиеся направления магнитодвижущей силы, ммс, которые будут вызывать соответствующее притяжение полюсных наконечников, которые будут показаны ниже.
Рис. 4.23. Создание магнитного поля с помощью униполярных и биполярных соединений обмоток. (A) Униполярное соединение # 1. (B) Униполярное соединение # 2. (C) Биполярное соединение # 1. (D) Биполярное соединение # 2.
Прежде чем обсуждать электромагнитное силовое взаимодействие между полюсными наконечниками ротора и статора, необходимо пояснить геометрическую конструкцию. Прежде всего, ротор имеет 50 зубцов, равных промежуткам между ними, другими словами, 50 зубцов и 50 зазоров с единичным отношением зубьев к зазору, рис. 4.6 и 4.24. Статор имеет восемь полюсных наконечников, расположенных на равном расстоянии друг от друга, то есть каждый полюсный наконечник разделен на 45 градусов. Каждый полюс статора имеет 6 зубцов, которые идентичны зубьям и зазорам ротора. Таким образом, на всех полюсных наконечниках статора 8 × 6 = 48 зубцов. У ротора 50 зубцов, так что у статора 2 зуба «отсутствуют». Поскольку между полюсными наконечниками статора имеется восемь зазоров, недостающие зубья полюсного наконечника составляют ½ шага между полюсными наконечниками статора, рис.4.24.
Прежде всего, ротор имеет 50 зубцов, равных промежуткам между ними, другими словами, 50 зубцов и 50 зазоров с единичным отношением зубьев к зазору, рис. 4.6 и 4.24. Статор имеет восемь полюсных наконечников, расположенных на равном расстоянии друг от друга, то есть каждый полюсный наконечник разделен на 45 градусов. Каждый полюс статора имеет 6 зубцов, которые идентичны зубьям и зазорам ротора. Таким образом, на всех полюсных наконечниках статора 8 × 6 = 48 зубцов. У ротора 50 зубцов, так что у статора 2 зуба «отсутствуют». Поскольку между полюсными наконечниками статора имеется восемь зазоров, недостающие зубья полюсного наконечника составляют ½ шага между полюсными наконечниками статора, рис.4.24.
Рис. 4.24. Геометрическая схема ротора и статора.
Теперь обратимся к рис. 4.24 и 4.25 вверху слева, и обратите внимание, что на изображении ротор показан с шестью зубьями, выровненными с шестью зубьями полюсного наконечника статора A1. Из-за геометрии статора и ротора зубья ротора также совпадают с полюсным наконечником A3 статора, который диаметрально противоположен A1. В то же время шесть зазоров ротора , а не зубцы, совмещены с шестью зубьями полюсов статора A2 и A4, другими словами, имеется выравнивание разности фаз на 180 градусов с полюсами A1 и A3.Если теперь ротор повернуть на шага зубьев по часовой стрелке, то есть на 1,8 градуса, то шесть зубцов ротора будут совмещены с зубьями полюсов B1 и B3, а шесть зазоров ротора будут совмещены с зубьями полюсов B2 и B4. Если ротор вращается на шага зуба против часовой стрелки, то выравнивание зазора зуба ротора B2, B4 переключается с B1, B3.
В то же время шесть зазоров ротора , а не зубцы, совмещены с шестью зубьями полюсов статора A2 и A4, другими словами, имеется выравнивание разности фаз на 180 градусов с полюсами A1 и A3.Если теперь ротор повернуть на шага зубьев по часовой стрелке, то есть на 1,8 градуса, то шесть зубцов ротора будут совмещены с зубьями полюсов B1 и B3, а шесть зазоров ротора будут совмещены с зубьями полюсов B2 и B4. Если ротор вращается на шага зуба против часовой стрелки, то выравнивание зазора зуба ротора B2, B4 переключается с B1, B3.
Рис. 4.25. Приращения шага вращения ротора, показывающие совмещения зубцов ротора и статора и зазора между зубьями статора, которые происходят каждые 1/200 оборота, то есть каждые 1,8 градуса.
Если теперь ротор повернуть еще на 1,8 градуса по часовой стрелке, из положения ротора на 0 градусов в положение ротора на 1,8 градуса, рис. 4.25 вверху справа, то произойдет совмещение зубцов ротора с зубьями статора с B1 и B3. и между зазором ротора и зубом статора с B2 и B4. Третья из четвертых комбинаций совмещения зубьев и зазора происходит при положении ротора 3,6 градуса, рис. 4.25 внизу справа и четвертая комбинация при положении ротора 5,4 градуса, рис. 4.25 внизу слева. Эти положения ротора приводятся в действие последовательными электромагнитными силами, которые будут объяснены ниже.Последовательность означает, что ротор шагового двигателя может вращаться по часовой или против часовой стрелки с шагом 1,8 градуса, то есть 200 шагов / оборот, и, таким образом, шаговый двигатель известен как шаговый двигатель с шагом 200 шагов / оборот.
Третья из четвертых комбинаций совмещения зубьев и зазора происходит при положении ротора 3,6 градуса, рис. 4.25 внизу справа и четвертая комбинация при положении ротора 5,4 градуса, рис. 4.25 внизу слева. Эти положения ротора приводятся в действие последовательными электромагнитными силами, которые будут объяснены ниже.Последовательность означает, что ротор шагового двигателя может вращаться по часовой или против часовой стрелки с шагом 1,8 градуса, то есть 200 шагов / оборот, и, таким образом, шаговый двигатель известен как шаговый двигатель с шагом 200 шагов / оборот.
Еще одна интересная особенность такого расположения магнитных сил заключается в том, что силы, действующие на ротор в плоскости бумаги, находятся в статическом равновесии, поэтому нет сил, перпендикулярных оси ротора, которые будут возбуждать вибрации и шум или вызывать изгиб. оси, и при этом не будет сил, закрывающих очень маленький воздушный зазор.Несмотря на то, что сумма больших сил на роторе в плоскости бумаги равна нулю, момент этих сил вокруг оси вращения не равен нулю; фактически они суммируются, чтобы помочь друг другу обеспечить рабочий крутящий момент выходного ротора 2 Н · м; это еще одна дань уважения разработчикам шагового двигателя. Также здесь следует сказать, что инженеры-производители заслуживают особой признательности за недорогое прецизионное изготовление и сборку «скромного» шагового двигателя.Теперь мы переходим к обсуждению распределения магнитного потока в шаговом двигателе.
Также здесь следует сказать, что инженеры-производители заслуживают особой признательности за недорогое прецизионное изготовление и сборку «скромного» шагового двигателя.Теперь мы переходим к обсуждению распределения магнитного потока в шаговом двигателе.
Географическая сетка | Физическая география
География — это пространственное понимание, которое требует точной системы координат для определения абсолютного и относительного местоположения. Абсолютное местоположение — это точная координата x и y на Земле. Относительное местоположение — это расположение чего-либо относительно других объектов. Например, когда вы используете GPS-навигатор в своем смартфоне или автомобиле, скажем, в Google Maps, вы указываете абсолютное местоположение.Но когда вы начинаете движение, устройство говорит вам повернуть направо или налево относительно объектов на земле: «Поверните налево на выезде 202» относительно других точек выезда. Или, если вы указываете дорогу к своему дому, вы часто используете относительное местоположение, чтобы помочь им понять, как добраться до вашего дома.
Или, если вы указываете дорогу к своему дому, вы часто используете относительное местоположение, чтобы помочь им понять, как добраться до вашего дома.
Большой и Малый круги
Большая часть сеточной системы Земли основана на местоположении Северного полюса, Южного полюса и экватора. Полюса представляют собой воображаемую линию, идущую от оси вращения Земли.Плоскость экватора представляет собой воображаемую горизонтальную линию, которая разрезает Землю на две равные половины. Это поднимает тему больших и малых кругов. Большой круг — это любой круг, который делит Землю на две равные половины. Это также самый большой круг, который можно нарисовать на сфере. Линия, соединяющая любые точки вдоль большого круга, также является кратчайшим расстоянием между этими двумя точками. Примеры больших кругов включают экватор, все линии долготы, линию, разделяющую Землю на день и ночь, называемую кругом освещения , и плоскость эклиптики , которая делит Землю на равные половины вдоль экватора. Маленькие круги — это круги, разрезающие землю, но не пополам. Примеры малых кругов включают все линии широты, кроме экватора, тропика Рака, тропика Козерога, Полярного круга и Южного полярного круга.
Маленькие круги — это круги, разрезающие землю, но не пополам. Примеры малых кругов включают все линии широты, кроме экватора, тропика Рака, тропика Козерога, Полярного круга и Южного полярного круга.
Широта и долгота
Многие думают, что широта — это линия, соединяющая точки на Земле, но это не так. Широта — это на самом деле угловое измерение к северу или к югу от экватора. Таким образом, 30 градусов северной широты означает точку, которая находится в 30 градусах севернее экватора.Широта также выражается в градусах, минутах и секундах; 360 градусов по кругу, 60 минут (‘) по градусу и 60 секунд (″) в минуту. При использовании Google Планета Земля координаты указываются в формате градусы / минуты / секунды. Широта варьируется от 0 градусов (экватор) до 90 градусов северной и южной широты (полюса). Линия, соединяющая все точки одной широты, называется параллелью , потому что линии проходят параллельно друг другу. Единственная параллель, которая также является большой окружностью, — это экватор.Все остальные параллели представляют собой маленькие кружочки. Ниже приведены наиболее важные параллельные линии:
Единственная параллель, которая также является большой окружностью, — это экватор.Все остальные параллели представляют собой маленькие кружочки. Ниже приведены наиболее важные параллельные линии:
- Экватор, 0 градусов
- Тропик Рака, 23,5 градуса с.ш.
- Тропик Козерога, 23,5 градуса ю.ш.
- Полярный круг, 66,5 градуса с.ш.
- Южный полярный круг, 66,5 градуса ю.ш.
- Северный полюс, 90 градусов северной широты (бесконечно малый круг)
- Южный полюс, 90 градусов ю.ш. (бесконечно малый круг)
Широта также иногда описывается как зона на широте .Некоторые из этих широтных зон включают:
- Низкая широта — обычно между экватором и 30 градусами северной широты .
- Средняя широта — между 30 и 60 градусами северной и южной широты
- Высокая широта — более 60 градусов северной широты и южной широты
- Экваториальная — в пределах нескольких градусов от экватора
- Тропический — в тропиках (между 23,5 ° северной широты и 23,5 ° ю.
 ш.
ш. - Субтропический — немного к полюсу тропиков, обычно около 25-30 градусов северной и южной широты.
- Полярный — в пределах нескольких градусов от Северного или Южного полюса
 ш.
ш. Долгота — угловое измерение к востоку и западу от нулевого меридиана (изображение справа).Как и широта, долгота измеряется в градусах, минутах и секундах. Линии, соединяющие равные точки долготы, называются меридианами . Но в отличие от параллелей, меридианы не проходят параллельно друг другу. Скорее они наиболее удалены друг от друга на экваторе и сливаются друг с другом к полюсам. Проблема с долготой заключается в том, что нет естественной базовой линии, такой как экватор для широты. Более ста лет страны использовали свой собственный «нулевой меридиан», который оказался проблематичным для торговли.Но в 1883 году в Вашингтоне, округ Колумбия, была проведена международная конференция по определению глобального нулевого меридиана. После недель дебатов Королевская обсерватория в Гринвиче, Англия, была определена как Гринвичский меридиан или также названный нулевым меридианом мира . Итак, сегодня долгота начинается от нулевого меридиана и измеряется к востоку и западу от этой линии.
Итак, сегодня долгота начинается от нулевого меридиана и измеряется к востоку и западу от этой линии.
На 180 градусах от нулевого меридиана в Тихом океане проходит международная линия перемены дат . Линия определяет, где в мире начинается новый день.Из-за этого международная линия перемены дат на самом деле не является прямой линией, она скорее следует за национальными границами, чтобы страна не была разделена на два отдельных дня (и мы думаем, что часовые пояса — это проблема). Если вы посмотрите на карту ниже, международная линия перемены дат находится справа в темной черной линии. Обратите внимание, как он нарисован, чтобы убедиться, что страны не разделены международной линией перемены дат.
Часовые пояса
Это также хорошее время, чтобы взглянуть на часовых поясов по всему миру.Если вы вернетесь к карте выше, вы можете увидеть разные часовые пояса разными цветами. Поскольку Земля вращается на 360 градусов за 24 часа, Земля вращается на 15 градусов каждый час, создавая 24 часовых пояса. В идеальном мире каждый часовой пояс будет следовать линиям долготы через каждые 15 градусов (по 7,5 градусов в каждом направлении от центра часового пояса). Но из-за политических границ часовые пояса не разделены так идеально и сильно различаются по форме и ширине. Гринвич, Англия, был выбран в середине девятнадцатого века в качестве отправной точки времени во всем мире.Причина заключалась в том, что в то время Англия была сверхдержавой того времени как в военном, так и в экономическом отношении. Таким образом, меридиан, проходивший через Гринвич, стал нулевым градусом или нулевым меридианом . Из-за вращения Земли относительно нулевого меридиана местоположения к востоку от нового меридиана означали, что время было впереди, в то время как местоположения к западу от меридиана отставали по времени относительно Гринвича, Англия. В конечном итоге, когда вы объединяете параллельные и меридиональные линии, вы получаете систему географической сетки , которая позволяет вам определять ваше точное местоположение на планете.
В идеальном мире каждый часовой пояс будет следовать линиям долготы через каждые 15 градусов (по 7,5 градусов в каждом направлении от центра часового пояса). Но из-за политических границ часовые пояса не разделены так идеально и сильно различаются по форме и ширине. Гринвич, Англия, был выбран в середине девятнадцатого века в качестве отправной точки времени во всем мире.Причина заключалась в том, что в то время Англия была сверхдержавой того времени как в военном, так и в экономическом отношении. Таким образом, меридиан, проходивший через Гринвич, стал нулевым градусом или нулевым меридианом . Из-за вращения Земли относительно нулевого меридиана местоположения к востоку от нового меридиана означали, что время было впереди, в то время как местоположения к западу от меридиана отставали по времени относительно Гринвича, Англия. В конечном итоге, когда вы объединяете параллельные и меридиональные линии, вы получаете систему географической сетки , которая позволяет вам определять ваше точное местоположение на планете.
Магнитное поле,
Магнитный Поле,
термин магнетизм происходит из региона Магнезия, города в Западной Турции, где греки нашли магниты, которые притягивали куски железа через космос. Также замечено, что, магниты притягивают и отталкивают. Мы может объяснить эту двойственную природу магнитной силы, предположив, что каждый магнит имеет два полюса, северный полюс (N) и южный полюс (S). Во время занятий вы заметите две вещи:
1) Когда два магнита приближаются друг к другу, как отталкивающиеся полюса; противоположные полюса привлекать.
2) Когда магнит подносят к железке, железо тоже притягивается к магнит, и он приобретает такую же способность притягивать другие железки.
ср
хотелось бы представить это силовое воздействие магнита на железоподобные предметы с помощью
понятие называется магнитным полем. В
понятие поля можно лучше понять, если вспомнить гравитационную силу
Земли на объект рядом с ней.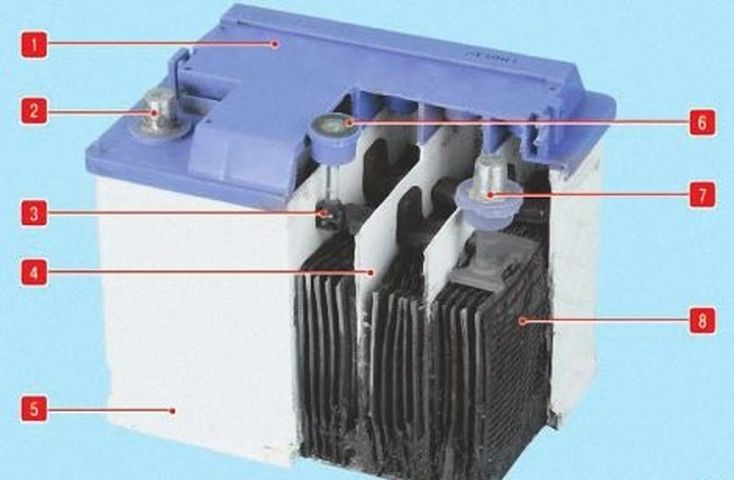 Мы говорим что
простое присутствие Земли создает гравитационное поле в окружающем
пространство, и что мы можем изобразить этот гравитационный силовой эффект линиями
начиная с Земли и уходя радиально в бесконечность.
Мы говорим что
простое присутствие Земли создает гравитационное поле в окружающем
пространство, и что мы можем изобразить этот гравитационный силовой эффект линиями
начиная с Земли и уходя радиально в бесконечность.
Луна
попадает в поле Земли. Так же,
Космонавт в космическом путешествии ощущает притяжение Земли. Космический шаттл также находится в поле Земли. В
причина, по которой они не падают, выходит за рамки этого курса, но я
объясните для полноты. Ни один из них
падают к Земле, потому что все они имеют достаточную горизонтальную скорость, чтобы
Земля. Если бы вы могли
горизонтально бросать бейсбольный мяч со скоростью 18 000 миль / ч, я бы также сделал вокруг
Земля и вернуться к вам.Поэтому мы
представляют притягивающую силу притяжения Земли с силовыми линиями. Направление линий поля обозначает
направление силы, которое тело будет испытывать вокруг Земли, и плотность
силовые линии (насколько близко они разделены) представляет силу
сила. Например, вы ближе к
Земля, сильнее сила.
Например, вы ближе к
Земля, сильнее сила.
Аналогично, магнит создает магнитное поле в окружающем его пространстве, в котором он магнитно влияет на любой другой магнитный материал.Сила представлена плотностью магнитного поля. линий. Линии магнитного поля замкнуты кривые, уходящие с Северного полюса и входящие в Южный полюс, когда вы следуете им снаружи магнит.
А компас, который сам по себе является маленьким магнитом, расположен параллельно магнитному полюсу. линии поля в точке его размещения. Кончик стрелки — это северный магнитный полюс, а ее конец — это Южный магнитный полюс.
Строительными блоками магнитов являются атомы, которые представляют собой маленькие крошечные магниты. Что касается магнетизма, мы можем
рассматривать атом как крошечный компас / магнит, указывающий на север
направление. Позже мы увидим, что
движение электронов (движущийся электрический заряд) — основная причина
магнетизм. Для практических целей мы
могут сосредоточиться на кластере атомов, называемом магнитными доменами , которые
выровнен в определенном направлении. Каждый
домен может состоять из миллиардов ориентированных атомов.В нормальных условиях магнитный материал, такой как железо, не
ведут себя как магнит, потому что домены не имеют предпочтительного направления
выравнивание. С другой стороны,
домены магнита (или намагниченного железа) все выровнены в определенных
направление. Домены отделены от
соседние домены — доменными стенками.
В общем, выравнивание внутри домена одинаково для всех атомов этого домена.
домен. Однако атомы одного
домена выровнены в другом направлении, чем атомы другого
домен.Эта ситуация обрисована в общих чертах
ниже для магнитного материала, намагниченного материала и для немагнитного
материал. Немагнитный материал
не имеет доменной структуры.
Каждый
домен может состоять из миллиардов ориентированных атомов.В нормальных условиях магнитный материал, такой как железо, не
ведут себя как магнит, потому что домены не имеют предпочтительного направления
выравнивание. С другой стороны,
домены магнита (или намагниченного железа) все выровнены в определенных
направление. Домены отделены от
соседние домены — доменными стенками.
В общем, выравнивание внутри домена одинаково для всех атомов этого домена.
домен. Однако атомы одного
домена выровнены в другом направлении, чем атомы другого
домен.Эта ситуация обрисована в общих чертах
ниже для магнитного материала, намагниченного материала и для немагнитного
материал. Немагнитный материал
не имеет доменной структуры.
доменов
можно вызвать выравнивание.
Рассмотрим обычный железный гвоздь. Его
домены ориентированы случайным образом, как на первом рисунке выше. Если вы принесете магнит, поднесите поблизости,
области железного гвоздя выровняются таким образом, что северный полюс железа
домены будут обращены к южному полюсу магнита и наоборот.
Когда вы снимаете магнит, гвоздь становится постоянным магнит на время. Тепловое движение (помните, чем выше температура, тем быстрее движутся атомы) атомов в конечном итоге может привести к тому, что большинство атомов вернутся к случайной ориентации. Кроме того, уронив магнит, не только будет вы нарушите его, но вы также разрушите выравнивание домена.
Другой способ сделать постоянный магнит — погладить железку (или железную стружку что вы будете делать как занятие) с помощью магнита.Железное бритье ведет себя как крошечный магниты.
Электромагнит:
А катушки из проволоки, подобные показанной на рисунке ниже, также могут производить магнитные поле, подобное магнитному. Если внутри, если катушки заполнены железным сердечником, магнитное поле даже становится сильнее за счет дополнительного магнетизма от утюга.
Патент США на кольцевой магнитный кодировщик, имеющий расположение полюсов, которое определяет угол поворота.
 Патент (Патент № 7,667,455, выданный 23 февраля 2010 г.) ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Патент (Патент № 7,667,455, выданный 23 февраля 2010 г.) ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ Данная заявка является национальной стадией международной заявки №PCT / JP2005 / 012863, подана 12 июля 2005 г. Эта заявка испрашивает преимущество японской патентной заявки 2004-204894, поданной 12 июля 2004 г .; 2004-204895, подана 12 июля 2004 г .; и 2004-320400, поданной 4 ноября 2004 г. Описания вышеуказанных заявок полностью включены в настоящий документ посредством ссылки.
Область изобретенияНастоящее изобретение относится к магнитному кодировщику, используемому для обнаружения вращения вращающегося элемента, установленного, например, в автомобиле или бытовом электрическом приборе.
Уровень техники Магнитный кодировщик используется, например, для определения угла поворота коленчатого вала автомобиля. ИНЖИР. 13 показывает пример обычного магнитного кодировщика. Магнитный кодировщик содержит часть вывода сигнала 101 , используемую в качестве эталона положения. Часть , 101, вывода сигнала расположена так, что ширина в окружном направлении магнитного полюса была бы вдвое больше, чем ширина магнитного полюса на другой части в окружном направлении.Ширина всех магнитных полюсов в области, отличной от части вывода сигнала , 101, в окружном направлении, предназначена для фиксированной (равной половине ширины в окружном направлении магнитного полюса в части вывода сигнала ). 101 ). Угол поворота на основе части 101 вывода сигнала (0 °) определяется в области.
Магнитный кодировщик содержит часть вывода сигнала 101 , используемую в качестве эталона положения. Часть , 101, вывода сигнала расположена так, что ширина в окружном направлении магнитного полюса была бы вдвое больше, чем ширина магнитного полюса на другой части в окружном направлении.Ширина всех магнитных полюсов в области, отличной от части вывода сигнала , 101, в окружном направлении, предназначена для фиксированной (равной половине ширины в окружном направлении магнитного полюса в части вывода сигнала ). 101 ). Угол поворота на основе части 101 вывода сигнала (0 °) определяется в области.
Кроме того, существует также метод, раскрытый в JP-A-7-74020. В этом методе часть вывода сигнала, используемая в качестве эталона положения, имеет выпуклую форму, в то время как заранее определенный образец расположения магнитных полюсов продолжается в других частях.Угол поворота, основанный на части вывода сигнала, обнаруживается в части шаблона расположения магнитных полюсов.
В таком магнитном кодировщике для обнаружения части вывода сигнала, используемой в качестве эталона положения, часть вывода сигнала должна проходить через часть для обнаружения с помощью датчика. Соответственно, магнитный кодировщик иногда поворачивают на максимальный угол почти 360 ° с целью обнаружения части вывода сигнала.
В последнее время остановка на холостом ходу поощряется с экологической точки зрения.Однако топливо подается во все цилиндры одновременно с перезапуском двигателя. Топливный жиклер для всех цилиндров не является предпочтительным с экологической точки зрения. Чтобы решить эту проблему, необходимо позиционировать цилиндр на основе угла поворота коленчатого вала, угла кулачка и т.п. сразу после запуска двигателя для подачи топлива только в цилиндр, который необходимо заправлять.
Однако в обычном случае магнитный кодировщик следует повернуть на максимальный угол около 360 ° с целью обнаружения части вывода сигнала. Соответственно, нельзя задать угол поворота при небольшом повороте за короткое время.
Соответственно, нельзя задать угол поворота при небольшом повороте за короткое время.
JP-A-9-49453 и JP-A-11-229948 раскрывают методы, в которых угол поворота может быть задан за короткое время. Однако в случае этих методов конструкции сложны, а количество компонентов велико, и поэтому желательно дальнейшее улучшение.
Таким образом, целью изобретения является создание магнитного кодировщика, способного определять угол поворота с небольшим поворотом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯДля решения вышеупомянутой проблемы изобретение реализуется в следующих режимах.
То есть магнитный кодировщик согласно изобретению представляет собой кольцевой магнитный кодировщик, в котором поочередно расположены несколько S-полюсов и N-полюсов, причем S-полюса и N-полюса являются магнитными полюсами. Магнитный кодировщик имеет структуру, в которой изменение ширины магнитных полюсов в направлении вращения в соответствии с углом поворота позволяет задавать угол поворота.
В соответствии с изобретением разница в ширине магнитных полюсов в направлении вращения позволяет задавать угол поворота, так что небольшое вращение может определять угол поворота.
Кроме того, магнитный кодировщик согласно изобретению представляет собой кольцевой магнитный кодировщик, в котором поочередно расположены множество S полюсов и N полюсов, причем S полюсов и N полюсов являются магнитными полюсами. Схема расположения магнитных полюсов содержит множество индексных частей, расположенных в окружном направлении с фиксированными интервалами.Множество частей стандартного шага соответственно предусмотрено между индексными частями, и множество частей определенного шага соответственно предусмотрено во всех частях стандартного шага или в частях стандартного шага, кроме одной части стандартного шага. Части определенного шага предоставляются в различных режимах для соответствующих частей стандартного шага. Индексная часть, часть со стандартным шагом и часть с определенным шагом отличаются по ширине магнитного полюса в окружном направлении.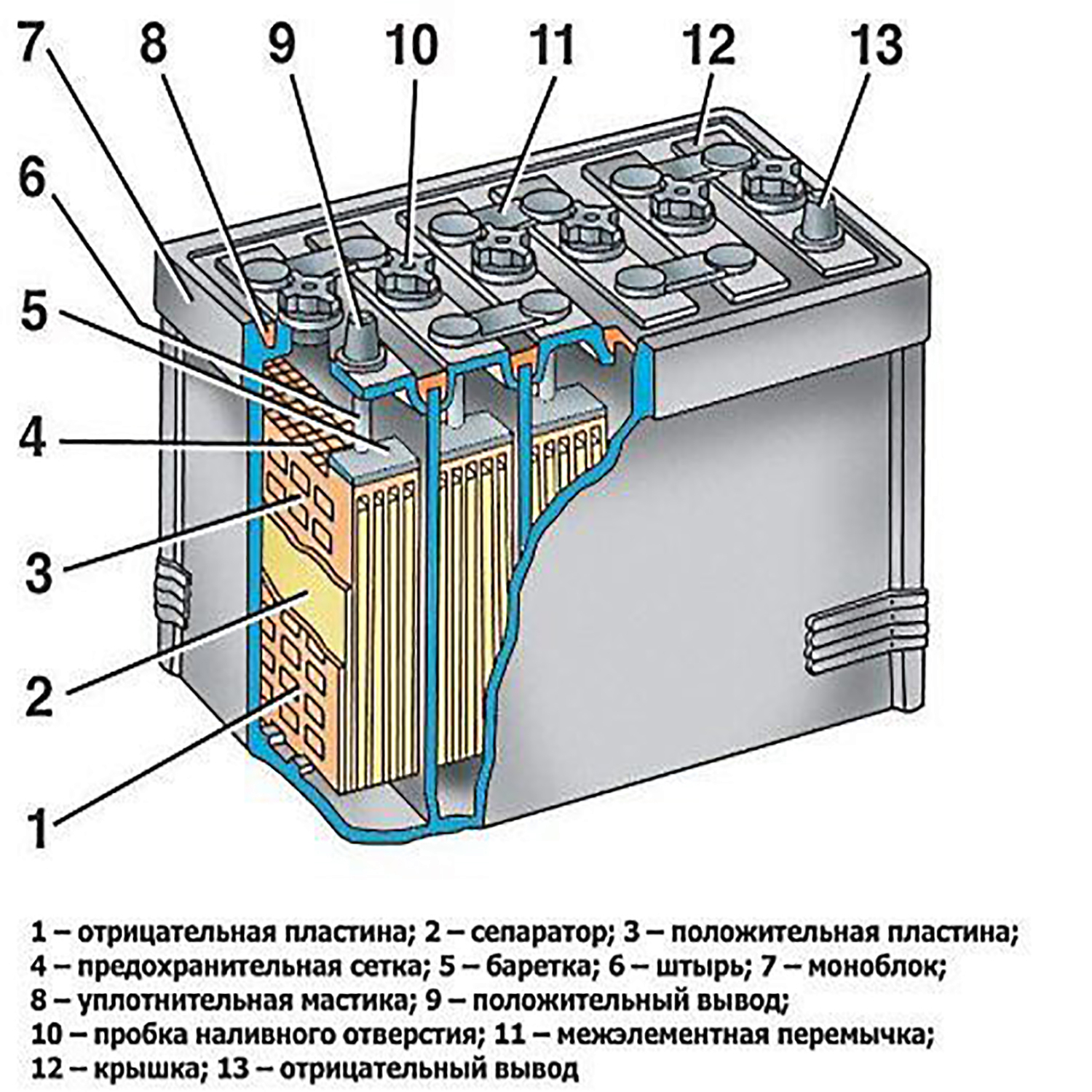
В соответствии с изобретением схема расположения магнитных полюсов в секции, разделенной индексной частью, различна для каждой секции.То есть стандартная часть основного тона предоставляется между всеми индексными частями, в то время как конкретная часть основного тона отличается по режиму (включая случай без определенной части основного тона) в каждой секции. Это позволяет указать раздел на основе определенной части высоты тона. Соответственно, небольшое вращение может определять угол поворота.
В качестве примера предоставления определенной части шага в режиме, отличном для каждой части стандартного шага, может быть рассмотрено расположение положения для обеспечения части определенного шага, отличной от каждой части стандартного шага, или размещение количества магнитных полюса в определенной части шага должны отличаться от полюсов магнитных полюсов в каждой части стандартного шага.
Кроме того, магнитный кодировщик согласно изобретению представляет собой кольцевой магнитный кодировщик, в котором поочередно расположены множество S-полюсов и N-полюсов, причем S-полюса и N-полюса являются магнитными полюсами. Магнитный кодер содержит первую дорожку, на которой размещено множество шаблонов размещения, соответственно имеющих одинаковое расположение магнитных полюсов, и вторую дорожку, на которой размещено множество шаблонов размещения, соответственно имеющих различное расположение магнитных полюсов.
Магнитный кодер содержит первую дорожку, на которой размещено множество шаблонов размещения, соответственно имеющих одинаковое расположение магнитных полюсов, и вторую дорожку, на которой размещено множество шаблонов размещения, соответственно имеющих различное расположение магнитных полюсов.
Как указано выше, предпочтительно определять угол поворота на основе сравнения между шаблонами размещения на первой дорожке и шаблонами размещения на второй дорожке.
Кроме того, рисунки расположения магнитных полюсов на второй дорожке предпочтительно отличаются по количеству магнитных полюсов, включенных в соответствующие шаблоны расположения.
Кроме того, предпочтительно, чтобы образцы расположения магнитных полюсов на первой дорожке были одинаковыми по ширине магнитного полюса в окружном направлении, а магнитные полюса, одинаковые по ширине в окружном направлении, были предусмотрены по всей окружности отслеживать.
Кроме того, предпочтительно, чтобы схема расположения магнитных полюсов на первой дорожке содержала индексную часть, предусмотренную в ее головке, и часть со стандартным шагом, равную количеству магнитных полюсов, причем часть со стандартным шагом, предоставляемая впоследствии, индексная часть и что индексная часть и часть со стандартным шагом различаются шириной магнитных полюсов в окружном направлении.
Вышеупомянутые соответствующие конструкции могут быть собраны для максимального использования.
В соответствии с изобретением небольшое вращение позволяет задать угол поворота.
ЧЕРТЕЖИЧертежи, описанные в данном документе, предназначены только для целей иллюстрации и никоим образом не предназначены для ограничения объема настоящего раскрытия.
РИС. 1 представляет собой вид в перспективе части магнитного кодировщика согласно изобретению;
РИС. 2 — схемы расположения магнитных полюсов магнитного кодировщика согласно изобретению;
РИС.3 — график, показывающий соотношение между величиной вращения и угловой скоростью при условии, что коленчатый вал вращается с равным ускорением до 600 об / мин за оборот при запуске электродвигателя ячейки;
РИС. 4 — график, показывающий изменение времени импульса, когда магнитный кодировщик согласно изобретению один раз поворачивается от точки C на фиг. 2;
2;
РИС. 5 — график, показывающий изменение времени импульса, когда магнитный кодировщик согласно изобретению один раз повернут от точки D на фиг. 2;
РИС.6 — график, показывающий изменение времени импульса, когда магнитный кодировщик согласно изобретению один раз поворачивается от точки E на фиг. 2;
РИС. 7 иллюстрирует модификацию схем расположения магнитных полюсов магнитного кодировщика согласно изобретению;
РИС. 8 — схемы расположения магнитных полюсов магнитного кодировщика согласно изобретению;
РИС. 9 — вид в перспективе части магнитного кодировщика согласно изобретению;
РИС. 10 — схемы расположения магнитных полюсов магнитного кодировщика согласно изобретению;
РИС.11 иллюстрирует выходные сигналы магнитного кодировщика согласно изобретению;
РИС. 12 — схемы расположения магнитных полюсов магнитного кодировщика согласно изобретению; и
ФИГ.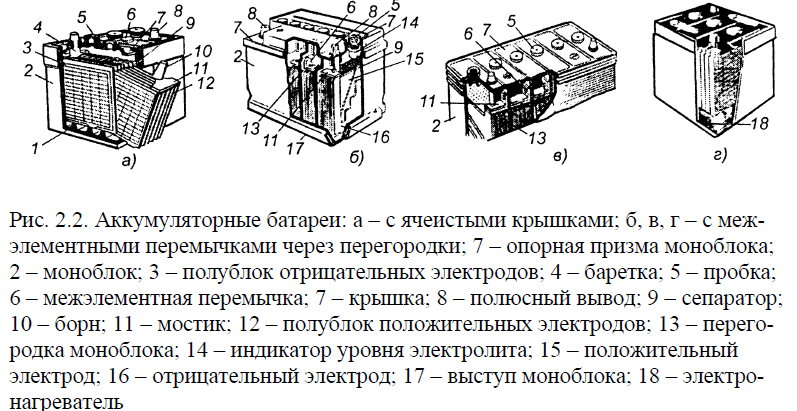 13 — вид в перспективе части магнитного кодировщика в обычном варианте осуществления.
13 — вид в перспективе части магнитного кодировщика в обычном варианте осуществления.
Наилучшие варианты осуществления изобретения будут подробно проиллюстрированы ниже со ссылкой на чертежи. Однако размер, материал, форма, относительное расположение и тому подобное компонентов, описанных в вариантах осуществления, не ограничивают объем изобретения, если не предоставлено особо конкретное описание.
РИС. 1 представляет собой вид в перспективе части магнитного кодировщика согласно изобретению. Магнитный кодировщик 1 на ФИГ. 1 содержит колесо 1 w и линию пути 1 a , предусмотренную на внешней окружности колеса 1 w . Средство обнаружения 2 для определения силы магнитного поля предусмотрено напротив поверхности дорожки 1, , и . Размер магнитного кодировщика , 1, может быть правильно выбран в соответствии с фиксируемым элементом вращения.
В качестве средства обнаружения используется магнитометрический датчик 2 . Магнитометрический датчик — это датчик для обнаружения магнитной энергии как объекта. Магнитная головка, к которой применяется операция электромагнитной индукции, дифференциальный трансформатор, элемент Холла, использующий операцию преобразования магнитной энергии в электричество, и элемент MR (элемент с эффектом магнитосопротивления) являются конкретными примерами магнитометрического датчика.
Дорожка 1 a образована из S полюсов и N полюсов, которые являются магнитными полюсами, попеременно расположенных по всей окружности.Магнитные полюса, расположенные напротив средства обнаружения 2 (в позиции обнаружения средства обнаружения 2 ), меняют полярность с N на S или с S на N, когда дорожка 1 a вращается. Изменение магнитного поля в это время регистрируется как импульс. Угол поворота и угловая скорость магнитного кодировщика , 1, вычисляются на основе обнаруженного числа импульсов, ширины импульса и т.п.
Угол поворота и угловая скорость магнитного кодировщика , 1, вычисляются на основе обнаруженного числа импульсов, ширины импульса и т.п.
Дорожка 1 a расположена так, что точки (0 °, 45 °, 90 °, 135 °, 180 °, 225 °, 270 °, 315 °) получаются разделением магнитного кодировщика 1 из Можно рассчитать от 0 ° до 360 ° на восемь по углу 45 °.
Схема расположения магнитных полюсов дорожки 1 a организована так, что заранее определенный узор 1 b повторяется через фиксированные интервалы (интервалы 45 °), как показано на фиг. 2. Заранее определенный шаблон 1 b содержит индекс 1 d (индексная часть), стандартный шаблон основного тона (часть стандартного шага) и шаблон малого шага 1 c (конкретный часть высоты тона), предусмотренная в стандартном шаблоне шага.Однако существует только один заранее определенный шаблон 1 b , не содержащий шаблона с мелким шагом 1 c . Индекс 1 d , стандартный образец шага и образец мелкого шага 1 c одинаковы в том, что полюса S и полюса N, которые являются магнитным полюсом, предусмотрены попеременно, но различаются по ширине магнитных полюсов в окружном направлении соответственно. Ширина магнитных полюсов в окружном направлении становится уже в порядке от индекса , 1, , , d , стандартного шага и тонкого шага , , c, в варианте осуществления.
Индекс 1 d , стандартный образец шага и образец мелкого шага 1 c одинаковы в том, что полюса S и полюса N, которые являются магнитным полюсом, предусмотрены попеременно, но различаются по ширине магнитных полюсов в окружном направлении соответственно. Ширина магнитных полюсов в окружном направлении становится уже в порядке от индекса , 1, , , d , стандартного шага и тонкого шага , , c, в варианте осуществления.
Индекс 1 d предоставляется в начале (левый конец на фиг. 2) заданного шаблона 1 b . Соответственно, индексы , 1, , , d , предусмотрены через фиксированные интервалы (интервалы 45 °) по всей окружности. Стандартные шаблоны основного тона, которые должны располагаться с определенными фиксированными шагами (стандартные шаги), предоставляются в области, отличной от индекса 1 d в заранее определенном шаблоне 1 b . Таким образом, стандартные шаблоны основного тона соответственно обеспечиваются между индексом 1 d и индексом 1 d . Шаблоны с мелким шагом , 1, , c, , соответственно, предусмотрены в соответствующих стандартных шаблонах основного тона, отличных от одного стандартного шаблона основного тона.
Таким образом, стандартные шаблоны основного тона соответственно обеспечиваются между индексом 1 d и индексом 1 d . Шаблоны с мелким шагом , 1, , c, , соответственно, предусмотрены в соответствующих стандартных шаблонах основного тона, отличных от одного стандартного шаблона основного тона.
Предопределенные шаблоны 1 b предоставляются в положениях от 0 ° до 45 °, от 45 ° до 90 °, от 90 до 135 °, от 135 ° до 180 °, от 180 ° до 225 °, от 225 ° до 270 ° , От 270 ° до 315 ° и от 315 ° до 360 ° соответственно.Как описано выше, заранее определенный узор 1, , b, , многократно предоставляется с интервалами 45 ° по всей окружности дорожки 1, , a.
Рисунок с мелким шагом 1 c содержит два мелких полюса N и тонкий полюс S, зажатые между ними. Шаблон с мелким шагом 1 c не предоставляется в предварительно определенном шаблоне 1 b под углом от 0 ° до 45 °, как показано на фиг. 2. В других заранее определенных шаблонах 1 b предусмотрены шаблоны с мелким шагом 1 c , так что позиция в заранее определенном шаблоне 1 b будет постепенно смещаться назад по мере увеличения угла .То есть шаблон с мелким шагом 1, , c размещается в положении, отличном для каждого заранее определенного шаблона 1 b дорожки 1 a . Положение шаблона с мелким шагом 1, , c, , таким образом, выполнено таким образом, чтобы заранее соответствовать углу поворота.
2. В других заранее определенных шаблонах 1 b предусмотрены шаблоны с мелким шагом 1 c , так что позиция в заранее определенном шаблоне 1 b будет постепенно смещаться назад по мере увеличения угла .То есть шаблон с мелким шагом 1, , c размещается в положении, отличном для каждого заранее определенного шаблона 1 b дорожки 1 a . Положение шаблона с мелким шагом 1, , c, , таким образом, выполнено таким образом, чтобы заранее соответствовать углу поворота.
Магнитное поле дорожки 1 a обнаруживается средством обнаружения 2 с внешней стороны внешней периферийной поверхности магнитного кодировщика 1 , как показано на фиг.1.
В магнитном кодировщике 1 , имеющем такую структуру, положение (0 °, 45 °, 90 °, 135 °, 180 °, 225 °, 270 ° или 315 °) в области, полученной делением 0 Можно указать от ° до 360 ° на 45 ° с поворотом на 90 ° из любого положения.
Например, в случае начала вращения из точки A на фиг. 2, информация о положении шаблона с мелким шагом 1, , c в заданном шаблоне 1 b может быть получена в области заданного шаблона 1 b в B, которая начинается с получения импульса первого индекса 1 d до получения импульса второго индекса 1 d , на основе импульса шаблона с мелким шагом 1 c .Информация о положении помогает указать, какому углу поворота соответствует считанный предварительно определенный шаблон 1 b . В приведенном выше случае можно видеть, что заранее определенный шаблон 1, , b соответствует диапазону от 90 ° до 135 °. Соответственно, можно указать, что положение, в котором получается импульс второго индекса, составляет 135 °.
Как описано выше, определяется, существует ли шаблон с мелким шагом 1 c в секции между индексом 1 d и индексом 1 d . Если шаблон с мелким шагом 1 c существует, то указывается положение шаблона с мелким шагом 1 c в секции. Это позволяет различать угол поворота магнитного кодировщика 1 на угол 45 °. В это время угол поворота магнитного кодировщика 1 , который требуется для задания угла поворота, составляет от 45 ° до 90 °, что необходимо для измерения участка между двумя индексами дорожки 1 a.
Если шаблон с мелким шагом 1 c существует, то указывается положение шаблона с мелким шагом 1 c в секции. Это позволяет различать угол поворота магнитного кодировщика 1 на угол 45 °. В это время угол поворота магнитного кодировщика 1 , который требуется для задания угла поворота, составляет от 45 ° до 90 °, что необходимо для измерения участка между двумя индексами дорожки 1 a.
Следовательно, в соответствии с магнитным кодировщиком 1 , небольшое вращение позволяет задать угол поворота. В случае обратного вращения магнитного кодировщика 1 обратное вращение можно различить, поскольку порядок считывания полюсов N и полюсов S индекса 1 d дорожки 1 a изменяется, так что небольшое вращение также позволяет останавливать обратное вращение.
С учетом вышеизложенного может быть обеспечено следующее преимущество.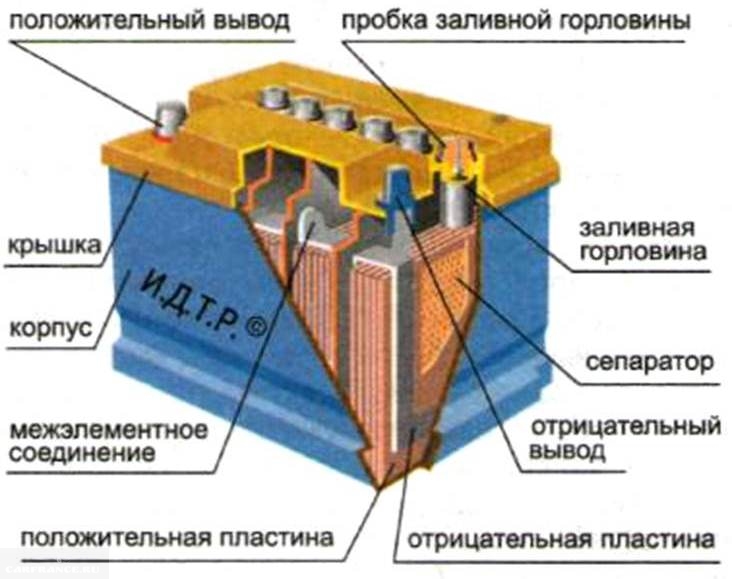 В случае четырехцилиндрового двигателя, например, коленчатый вал должен обычно поворачиваться на максимальный угол 360 ° с целью определения положения цилиндра. С другой стороны, вращение коленчатого вала в пределах 90 ° от запуска двигателя позволяет указать положение цилиндра. Соответственно, топливо может быть впрыснуто только в необходимый цилиндр, так что ненужный топливный жиклер может быть уменьшен. Это эффективно с экологической точки зрения.
В случае четырехцилиндрового двигателя, например, коленчатый вал должен обычно поворачиваться на максимальный угол 360 ° с целью определения положения цилиндра. С другой стороны, вращение коленчатого вала в пределах 90 ° от запуска двигателя позволяет указать положение цилиндра. Соответственно, топливо может быть впрыснуто только в необходимый цилиндр, так что ненужный топливный жиклер может быть уменьшен. Это эффективно с экологической точки зрения.
Кроме того, магнитный кодировщик 1 эффективен как средство бесконтактного управления вращением.Магнитный кодировщик 1 можно также использовать, например, для управления вращением руки робота.
Теперь, в варианте осуществления, индекс 1 d , стандартный шаблон основного тона и шаблон точного шага 1 c в заранее определенном шаблоне 1 b разделены на восемь на одной дорожке 1 , и будут сравниваться по длительности импульса (скважности).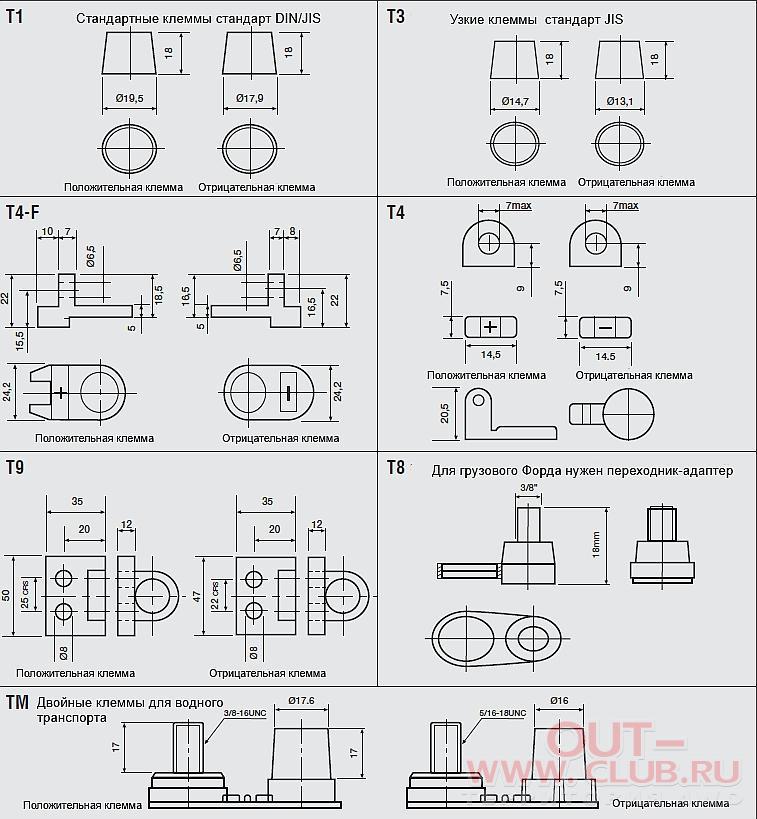 В случае, когда угловая скорость изменяется, например, во время пуска, это изменение может рассматриваться как вызывающее трудности в различении каждого из вышеперечисленных.
В случае, когда угловая скорость изменяется, например, во время пуска, это изменение может рассматриваться как вызывающее трудности в различении каждого из вышеперечисленных.
Однако даже в таком случае установка ширины шага на основе возрастающей характеристики угловой скорости так, чтобы размер каждого из стандартного шаблона шага и шаблона малого шага 1 c был бы ясен или сравнение ширины предшествующего и последующего импульсов позволяет определить абсолютное положение.
В качестве примера будет показан случай, когда магнитный кодировщик 1 установлен на коленчатом валу автомобиля. Здесь проиллюстрирован случай, когда угловая скорость коленчатого вала изменяется до 600 об / мин за один оборот с равным ускорением при запуске электродвигателя ячейки.ИНЖИР. 3 представляет собой график, показывающий зависимость между величиной вращения и угловой скоростью коленчатого вала в вышеупомянутом случае.
Кроме того, здесь будет проиллюстрирован случай, когда угол рисунка расположения магнитных полюсов (соответствующий общей ширине (углу) ширины полюса S и ширины полюса N) составляет 8,2 ° для индекса 1 d, 4,6 ° для стандартного шага и 2,3 ° для мелкого шага.
РИС. 4-6 представляют собой графики, показывающие изменение времени импульса, когда магнитный кодировщик 1 , имеющий вышеупомянутую структуру, поворачивается один раз.На графиках горизонтальная ось показывает обнаруженные импульсы, а вертикальная ось показывает ширину импульса (время импульса). Фиг. С 4 по 6 показаны случаи начала из точек C, D и E на фиг. 2 соответственно. В любом случае импульс с индексом 1 d и (два) импульса шаблона с мелким шагом 1 c обязательно обнаруживаются в пределах поворота на 90 °. Соответственно, можно определить угол поворота (абсолютное положение) даже во время запуска.
В приведенном выше описании упоминается структура, в которой изменение положения шаблона с мелким шагом 1 c в предварительно определенном шаблоне 1 b позволяет угол поворота заданного шаблона 1 b подлежит уточнению. Однако можно указать заранее определенный шаблон 1 b , когда шаблон с мелким шагом 1 c в заранее определенном шаблоне 1 b сам по себе отличается для каждого заранее определенного шаблона 1 б.
Однако можно указать заранее определенный шаблон 1 b , когда шаблон с мелким шагом 1 c в заранее определенном шаблоне 1 b сам по себе отличается для каждого заранее определенного шаблона 1 б.
Например, изменение количества магнитных полюсов, которое формирует шаблон с мелким шагом 1 c , для каждого заданного шаблона 1 b может также позволить угол поворота заданного шаблона 1 b уточнить.В более конкретном примере количество шаблонов с мелким шагом 1, , c в заданном шаблоне 1 b на дорожке 1, , , увеличивается с каждым интервалом в 45 °, как показано на фиг. 7. Фиг. 7 показывает часть дорожки , 1, , , . На фиг. 7, шаблон с мелким шагом 1 c , показанный в левой части чертежа, содержит каждый из полюсов N и S, в то время как шаблон с мелким шагом 1 c , показанный в правой части чертежа, содержит каждый из два из северных и южных полюсов.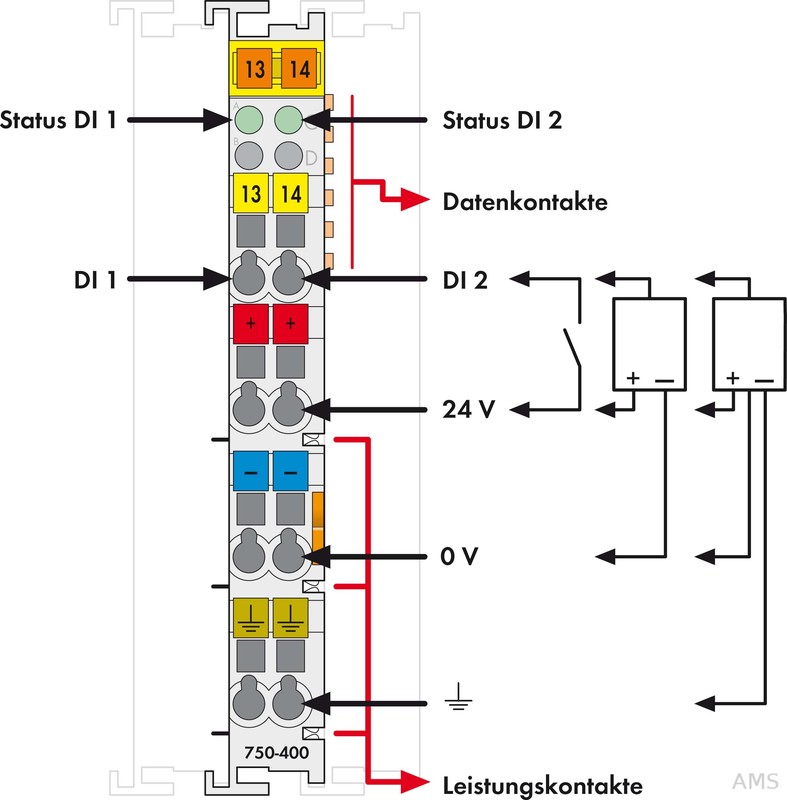 В такой структуре задание количества магнитных полюсов в шаблоне с мелким шагом 1 c в одной секции между двумя индексами на выходе дорожки 1 a позволяет угол поворота магнитного кодировщика 1 следует указать углом 45 °.
В такой структуре задание количества магнитных полюсов в шаблоне с мелким шагом 1 c в одной секции между двумя индексами на выходе дорожки 1 a позволяет угол поворота магнитного кодировщика 1 следует указать углом 45 °.
Конечно, может быть возможно предоставить шаблон с мелким шагом 1 c в каждом заранее определенном шаблоне 1 b в другом режиме в соответствии с комбинацией положения расположения и количества магнитных Полюс мелкого шага 1 c .Это эффективно в том случае, если интервалы заранее определенных рисунков 1, , b являются узкими, а большее количество заранее определенных рисунков 1 b предусмотрено, например, по всей окружности. В варианте осуществления, проиллюстрирован случай, когда шаблоны малого тона соответственно обеспечиваются в соответствующих шаблонах стандартного тона, отличных от одного шаблона стандартного тона. Само собой разумеется, что шаблоны с мелким шагом могут быть предоставлены в разных режимах для всех стандартных шаблонов основного тона.Кроме того, в качестве примера приведен случай, когда индексная часть (индекс 1 d ), стандартная часть основного тона (стандартный шаблон основного тона) и конкретная часть основного тона (шаблон с мелким шагом 1 c ) становятся узкими. по ширине магнитных полюсов в окружном направлении в указанном выше порядке. Само собой разумеется, однако, что отношение, связанное с размером, не имеет значения, если каждая ширина различна.
Само собой разумеется, что шаблоны с мелким шагом могут быть предоставлены в разных режимах для всех стандартных шаблонов основного тона.Кроме того, в качестве примера приведен случай, когда индексная часть (индекс 1 d ), стандартная часть основного тона (стандартный шаблон основного тона) и конкретная часть основного тона (шаблон с мелким шагом 1 c ) становятся узкими. по ширине магнитных полюсов в окружном направлении в указанном выше порядке. Само собой разумеется, однако, что отношение, связанное с размером, не имеет значения, если каждая ширина различна.
Другой магнитный кодировщик согласно другому аспекту изобретения будет описан со ссылкой на фиг.8.
В качестве примера показан случай использования магнитного кодировщика 1 в коленчатом валу четырехцилиндрового двигателя. ИНЖИР. 8 иллюстрирует схемы расположения магнитных полюсов магнитного кодировщика согласно изобретению. На фиг. 8 показаны схема расположения магнитных полюсов на дорожке 1 a магнитного кодировщика 1 , используемого в коленчатом валу, и схема расположения магнитных полюсов на дорожке 3 a магнитного кодировщика используется в распредвале.Схема расположения магнитных полюсов на дорожке 1, , и магнитного кодировщика 1 , используемого в коленчатом валу, имеет ту же структуру, что и в случае, описанном выше, и поэтому описание вышеизложенного будет опущено.
На фиг. 8 показаны схема расположения магнитных полюсов на дорожке 1 a магнитного кодировщика 1 , используемого в коленчатом валу, и схема расположения магнитных полюсов на дорожке 3 a магнитного кодировщика используется в распредвале.Схема расположения магнитных полюсов на дорожке 1, , и магнитного кодировщика 1 , используемого в коленчатом валу, имеет ту же структуру, что и в случае, описанном выше, и поэтому описание вышеизложенного будет опущено.
В четырехцилиндровом двигателе распределительный вал вращается на 360 °, когда коленчатый вал вращается на 360 ° × 2 оборота. Во время подъема двигателя (во время запуска двигателя) относительные положения коленчатого вала и распределительного вала фиксируются.Соответственно, получение положения угла поворота коленчатого вала позволяет указать положение кулачка (угол кулачка). Коленчатый вал, однако, следует оценивать, находится ли он в первом или втором витках, поскольку распределительный вал совершает один оборот, когда коленчатый вал совершает два поворота, как описано выше.
В качестве метода оценки магнитный кодировщик 1 , имеющий дорожку 1 a , проиллюстрированный на фиг. 2 предусмотрен в коленчатом валу, в то время как магнитный кодировщик с дорожкой 3 a предусмотрен в распределительном валу, как показано на фиг.8. Это позволяет обнаруживать сигнал кулачка и сигнал положения кулачка. Для обнаружения сигналов на стороне кулачка может использоваться компонент, подобный средству обнаружения 2 магнитного кодировщика 1 . Что касается магнитного кодировщика 1 , описание здесь опускается, поскольку оно такое же, как описано выше.
Магнитный кодировщик, установленный на распределительном валу, снабжен на всей его внешней периферийной поверхности дорожкой 3 a , показанной на фиг.8. S-полюса и N-полюса, которые являются магнитными полюсами, расположены наполовину и наполовину по окружности направляющей 3 a . Схема расположения на дорожке 3 a имеет цикл 360 °.
Схема расположения на дорожке 3 a имеет цикл 360 °.
От 0 ° до 180 ° (полюс N) и от 180 ° до 360 ° (полюс S) пути 3 a соответственно соответствуют 0 ° до 360 ° пути 1 a из магнитный кодировщик 1 предусмотрен в коленчатом валу.
Таким образом, в соответствии с дорожкой 3 и от 0 ° до 180 ° или от 180 ° до 360 °, указывается, находится ли кривошип в первом или втором повороте.Сигнал положения кулачка выводит Hi в полюсе N от 0 ° до 180 ° для обнаружения первого поворота кривошипа и выдает Lo в полюсе S от 180 ° до 360 ° для обнаружения второго поворота кривошипа, чтобы оценить количество оборотов кривошипа.
Как описано выше, поворот коленчатого вала в пределах 90 ° в четырехцилиндровом двигателе позволяет указать угол поворота коленчатого вала, а также положение кулачка (угол кулачка), так что можно получить положение цилиндра. Это позволяет управлять двигателем, при котором ненужный топливный жиклер сокращается с момента сразу после запуска двигателя.
Это позволяет управлять двигателем, при котором ненужный топливный жиклер сокращается с момента сразу после запуска двигателя.
РИС. 9 — вид в перспективе части другого магнитного кодировщика согласно изобретению. Как показано на фиг. 9, магнитный кодировщик 10 содержит колесо 10 w , первую дорожку 10 a и вторую дорожку 10 b на внешней окружности колеса 10 w . Средства обнаружения 20 и 30 для определения силы магнитных полей первой и второй дорожек соответственно 10 a и 10 b расположены напротив поверхностей первой и второй дорожек 10 a и 10 b .Размер магнитного кодировщика , 10, может быть правильно выбран в соответствии с устанавливаемым элементом вращения.
В качестве средств обнаружения используются магнитометрические датчики 20 и 30 . Магнитометрический датчик — это датчик для обнаружения магнитной энергии как объекта. Магнитная головка, к которой применяется операция электромагнитной индукции, дифференциальный трансформатор, элемент Холла, использующий операцию преобразования магнитной энергии в электричество, и элемент MR (элемент с эффектом магнитосопротивления) являются конкретными примерами магнитометрического датчика.
Магнитометрический датчик — это датчик для обнаружения магнитной энергии как объекта. Магнитная головка, к которой применяется операция электромагнитной индукции, дифференциальный трансформатор, элемент Холла, использующий операцию преобразования магнитной энергии в электричество, и элемент MR (элемент с эффектом магнитосопротивления) являются конкретными примерами магнитометрического датчика.
Первая дорожка 10 a и вторая дорожка 10 b расположены рядом на внешней окружности колеса 10 w . Обе из первой дорожки 10 a и второй дорожки 10 b имеют структуру, в которой S-полюса и N-полюса, магнитные полюса, расположены поочередно по всей окружности. Вращение первой дорожки 10 a и второй дорожки 10 b вызывает изменение полярности магнитных полюсов, расположенных в положениях, противоположных средству обнаружения 20 и 30 (положения обнаружения средства обнаружения 20 и 30 ) от N до S или от S до N.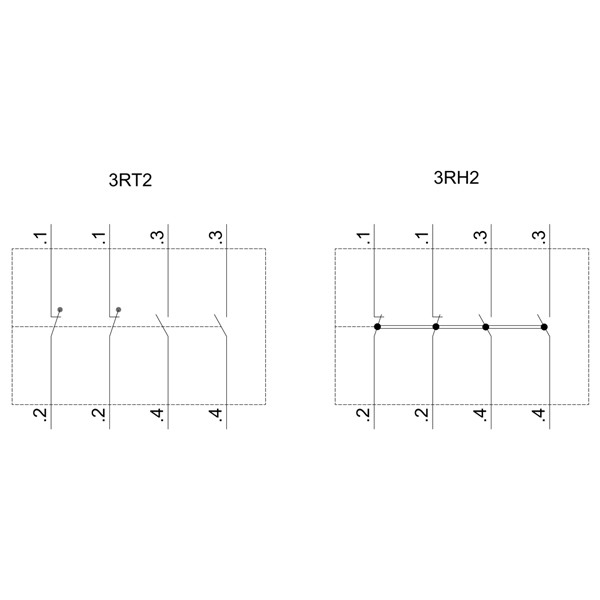 Изменение магнитного поля детектируется как импульс для вычисления угла поворота и угловой скорости магнитного кодировщика 10 на основе количества, ширины и т.п. обнаруженного импульса.
Изменение магнитного поля детектируется как импульс для вычисления угла поворота и угловой скорости магнитного кодировщика 10 на основе количества, ширины и т.п. обнаруженного импульса.
Первая дорожка 10 a имеет структуру, в которой предусмотрены множественные (четыре) рисунка расположения, соответственно имеющие одинаковое расположение магнитных полюсов. С другой стороны, вторая дорожка , 10, , b, имеет структуру, в которой предусмотрено множество (четыре) рисунка компоновки, соответственно имеющих различное расположение магнитных полюсов.Это будет описано более подробно ниже.
На первой дорожке 1 a шаблоны расположения, каждая из которых имеет пару полюсов N и S, предусмотрены в диапазоне от 0 ° до 90 °, от 90 ° до 180 °, от 180 ° до 270 °. ° и от 270 ° до 360 ° соответственно, как показано на фиг. 10. Полюс N и полюс S каждой схемы расположения равны по ширине магнитным полюсам в окружном направлении. То есть соответствующие магнитные полюса имеют ширину 45 °. Соответственно, первая направляющая , 1, , , имеет структуру, в которой полюса N и S, имеющие одинаковую ширину в окружном направлении, попеременно предусмотрены по всей окружности.
То есть соответствующие магнитные полюса имеют ширину 45 °. Соответственно, первая направляющая , 1, , , имеет структуру, в которой полюса N и S, имеющие одинаковую ширину в окружном направлении, попеременно предусмотрены по всей окружности.
Такая конструкция позволяет обнаруживать поворот магнитного кодировщика 10 на угол 45 ° на основе обнаружения магнитного поля на первой дорожке 1 a . То есть магнитный кодировщик 10 вращается на 45 ° в течение времени от обнаружения изменения полярности магнитного поля с N на S в качестве импульса до обнаружения изменения полярности магнитного поля с S на N. в виде импульса (и в течение времени от обнаружения изменения полярности магнитного поля с S на N в виде импульса до обнаружения изменения полярности магнитного поля с N на S в виде импульса).
С другой стороны, вторая дорожка 1 b предназначена для вычисления информации для определения положений (0 °, 45 °, 90 °, 135 °, 180 °, 225 °, 270 ° и 315 °), которые получаются делением от 0 ° до 360 ° магнитного кодировщика 1 на восемь под углом 45 °. На второй дорожке 1 b шаблоны компоновки, имеющие различное количество магнитных полюсов, предусмотрены в положениях от 0 ° до 90 °, от 90 ° до 180 °, 180 ° до 270 ° и от 270 ° до 360 °, соответственно. .То есть пара полюсов N и S предусмотрены под углом от 0 ° до 90 °, две пары полюсов N и S предусмотрены под углом от 90 ° до 180 °, четыре пары полюсов N и S предусмотрены в От 180 ° до 270 °, и шесть пар полюсов N и S предусмотрены под углом от 270 ° до 360 °, как показано на фиг. 10.
На второй дорожке 1 b шаблоны компоновки, имеющие различное количество магнитных полюсов, предусмотрены в положениях от 0 ° до 90 °, от 90 ° до 180 °, 180 ° до 270 ° и от 270 ° до 360 °, соответственно. .То есть пара полюсов N и S предусмотрены под углом от 0 ° до 90 °, две пары полюсов N и S предусмотрены под углом от 90 ° до 180 °, четыре пары полюсов N и S предусмотрены в От 180 ° до 270 °, и шесть пар полюсов N и S предусмотрены под углом от 270 ° до 360 °, как показано на фиг. 10.
Другими словами, во второй дорожке 1 b , количество магнитных полюсов в каждом шаблоне размещения рядом с шаблоном размещения на первой дорожке 1 a (шаблон, имеющий пару полюсов N и S) различается в зависимости от угла поворота.Конкретно, количество магнитных полюсов увеличивается шаг за шагом по мере увеличения угла поворота. Таким образом, шаблон компоновки второй дорожки , 1, , b, заранее скомпонован так, чтобы соответствовать углу поворота.
РИС. 11 показаны выходные сигналы от средства обнаружения 20 и 30 . Как показано на фиг. 11, выходной сигнал для первой дорожки 10, , и имеет форму волны, имеющую цикл 90 °, где полюс N соответствует Hi, а полюс S — Lo.
С другой стороны, выходной сигнал для второй дорожки 10 b имеет форму волны, имеющую циклы, разные в соответствующих областях от 0 ° до 90 °, от 90 ° до 180 °, от 180 ° до 270 ° и 270 °. ° до 360 ° на угол 90 °. То есть число импульсов переключения между Hi и Lo равно нулю в области от 0 ° до 45 ° и от 45 ° до 90 °, один в области от 90 ° до 135 ° и от 135 ° до 180 °, три дюйма область от 180 ° до 225 ° и от 225 ° до 270 ° и пять в области от 270 ° до 315 ° и от 315 ° до 360 °.Импульсы под углом 0 °, 45 °, 90 °, 135 °, 180 °, 225 °, 270 ° и 315 ° не считаются импульсами переключения между Hi и Lo.
В магнитном кодировщике 10 , имеющем такую структуру, положение (0 °, 45 °, 90 °, 135 °, 180 °, 225 °, 270 ° или 315 °) в областях, полученных делением от 0 до 360 ° на угол 45 ° можно задать в пределах поворота на 90 ° из любого положения.
Например, в случае начала вращения из точки A на фиг. 11, количество импульсов переключения между Hi и Lo выхода для второй дорожки 10 b равно единице в области Lo в течение времени B от получения первого импульса, с которым выход для первой дорожки 10 переключается с Hi на Lo для получения последующего импульса, с которым выход переключается с Lo на Hi.Таким образом, можно видеть, что положение, в котором происходит переключение импульса с Lo на Hi, составляет 180 ° на первой дорожке 10 a.
Как описано выше, количество импульсов переключения между Hi и Lo на второй дорожке 10 b подсчитывается на участке (соответствующем углу 45 °), который начинается с переключения выхода для первая дорожка 10 a от Hi до Lo или от Lo до Hi до переключения с Lo на Hi или с Hi на Lo.Число импульсов способствует определению угла поворота магнитного кодировщика 10, в конце участка вывода для первой дорожки 10 a .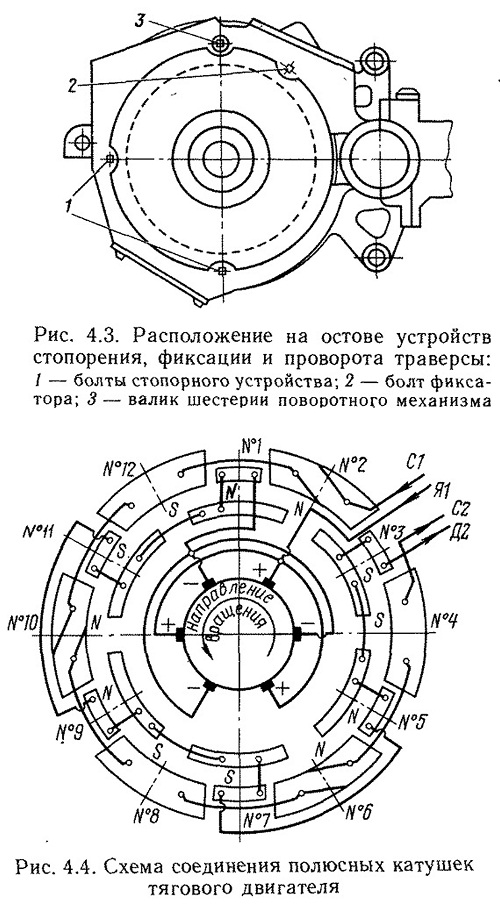 В этом случае угол поворота магнитного кодировщика 10 , необходимый для задания угла поворота, становится от 45 ° до 90 °, что необходимо для измерения импульсов переключения между Hi и Lo на участке первой дорожки 10 a .
В этом случае угол поворота магнитного кодировщика 10 , необходимый для задания угла поворота, становится от 45 ° до 90 °, что необходимо для измерения импульсов переключения между Hi и Lo на участке первой дорожки 10 a .
Следовательно, в соответствии с магнитным кодировщиком 10 , показанным на фиг.10 небольшой поворот позволяет указать угол поворота. Кроме того, даже в случае обратного вращения магнитного кодировщика 10 , обратное вращение можно различить, поскольку порядок Hi и Lo на второй дорожке 10 b изменяется в секции, где импульс переключается между Хай и Лоу в первой дорожке 10 . Это позволяет остановить обратное вращение с небольшим вращением.
В соответствии с вышеизложенным, есть следующее преимущество.В случае четырехцилиндрового двигателя, например, коленчатый вал обычно должен был быть повернут на максимальный угол 360 ° с целью определения положения цилиндра. С другой стороны, поворот коленчатого вала в пределах 90 ° от запуска двигателя позволяет указать положение цилиндра. Соответственно, топливо может быть впрыснуто только в необходимый цилиндр, и, следовательно, ненужный топливный жиклер может быть уменьшен. Это эффективно с экологической точки зрения.
С другой стороны, поворот коленчатого вала в пределах 90 ° от запуска двигателя позволяет указать положение цилиндра. Соответственно, топливо может быть впрыснуто только в необходимый цилиндр, и, следовательно, ненужный топливный жиклер может быть уменьшен. Это эффективно с экологической точки зрения.
Кроме того, магнитный кодировщик 10 эффективен как средство бесконтактного управления вращением и может также использоваться, например, для управления вращением руки робота.
РИС. 12 иллюстрирует схемы расположения магнитных полюсов другого магнитного кодировщика согласно изобретению.
Каждый из шаблонов расположения магнитных полюсов с интервалами 45 ° на первой дорожке имеет индекс (индексную часть) в начале и шаблон (часть со стандартным шагом), включающий равное количество магнитных полюсов, причем шаблон является сформированы после индекса, и все шаблоны размещения имеют одинаковый рисунок, как показано на фиг. 12. Ширина магнитных полюсов в окружном направлении различается между индексной частью и частью со стандартным шагом.С другой стороны, каждая из схем расположения магнитных полюсов с интервалами 45 ° на второй дорожке отличается количеством магнитных полюсов и схемой расположения. В Варианте 3 осуществления на второй дорожке количество пары полюсов N и S разное для каждого шаблона компоновки. Как показано на фиг. 12, однако, количество одиночных полюсов другое. То есть номер магнитного полюса на второй дорожке увеличивается один за другим, так что количество магнитных полюсов будет четыре под углом от 0 ° до 45 °, пять от 45 ° до 90 ° и шесть под углом 90 ° к 135 °, при увеличении угла поворота на 45 °.Это позволяет импульсам переключения между Hi и Lo увеличиваться один за другим для каждого шаблона компоновки по мере увеличения угла поворота. На второй дорожке, однако, пара магнитных полюсов, имеющих ширину, равную ширине указателя на первой дорожке, предусмотрена рядом с указателем, за которыми следуют магнитные полюса, ширина которых различна для каждой схемы расположения, с целью уменьшения помех в магнитное поле.
12. Ширина магнитных полюсов в окружном направлении различается между индексной частью и частью со стандартным шагом.С другой стороны, каждая из схем расположения магнитных полюсов с интервалами 45 ° на второй дорожке отличается количеством магнитных полюсов и схемой расположения. В Варианте 3 осуществления на второй дорожке количество пары полюсов N и S разное для каждого шаблона компоновки. Как показано на фиг. 12, однако, количество одиночных полюсов другое. То есть номер магнитного полюса на второй дорожке увеличивается один за другим, так что количество магнитных полюсов будет четыре под углом от 0 ° до 45 °, пять от 45 ° до 90 ° и шесть под углом 90 ° к 135 °, при увеличении угла поворота на 45 °.Это позволяет импульсам переключения между Hi и Lo увеличиваться один за другим для каждого шаблона компоновки по мере увеличения угла поворота. На второй дорожке, однако, пара магнитных полюсов, имеющих ширину, равную ширине указателя на первой дорожке, предусмотрена рядом с указателем, за которыми следуют магнитные полюса, ширина которых различна для каждой схемы расположения, с целью уменьшения помех в магнитное поле. Причина, по которой указатель представлен на первой дорожке, заключается в том, что переключение на угол 45 ° ясно.Другими словами, выходной импульс для первой дорожки является длинным по ширине импульса в индексной части и коротким по ширине импульса в части, отличной от индекса. Соответственно, изменение ширины импульса позволяет обнаруживать переключение на угол 45 °.
Причина, по которой указатель представлен на первой дорожке, заключается в том, что переключение на угол 45 ° ясно.Другими словами, выходной импульс для первой дорожки является длинным по ширине импульса в индексной части и коротким по ширине импульса в части, отличной от индекса. Соответственно, изменение ширины импульса позволяет обнаруживать переключение на угол 45 °.
Сравнение вывода для первой дорожки и вывода для второй дорожки также позволяет задавать угол поворота в диапазоне от 45 ° до 90 °, аналогично случаю кодирующего устройства, показанного на фиг. 10. То есть угол поворота задается на основе количества импульсов переключения между Hi и Lo на второй дорожке в течение времени от обнаружения первого индекса до обнаружения последующего индекса на первой дорожке.Кроме того, на фиг. 10, магнитные полюса увеличиваются на пару полюсов N и S для фиксированного угла поворота на второй дорожке. На фиг. 12, однако, количество магнитных полюсов может увеличиваться на один полюс для фиксированного угла поворота.